底下是將 2019.07.15 以 1900mm 直焦錄影(ATOMOS Ninja Flame 七吋外接螢幕錄製的4K30P 影片,完整影片在此)的月亮,全部在 Mac 下完成後製的月亮:

(註:從顏色的分佈,推測應為月球自有的,並非後製造成的,後續再進一步說明。)
其實過程並不難,只是很耗時間,於後製過程中用到了 Final Cut Pro 及 PixInsight。
Final Cut Pro 主要是將影片轉成序列的 Tif 檔:


而原先 1:40:21 的影片,選取了 1:29:23 來輸出 Tif 檔,這是因為後面幾秒的影片發現似乎拍到了 UFO ,將這段剪輯下來上傳到 YouTube ,連結會放在附錄。

這麼短的影片可以轉出 2693 個影像檔:

容量將近兩百 G :

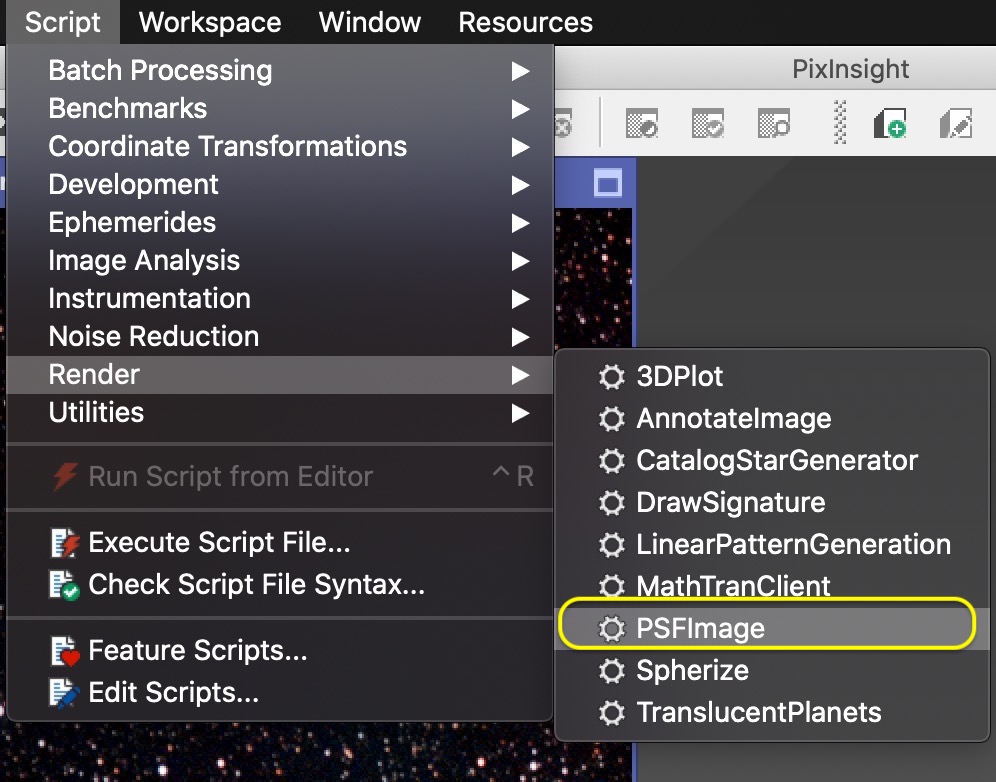
有了這些 Tif 檔,後續全部在PixInsight 完成,包括這些步驟:

詳細步驟:
兩千多張的影像,使用 FFTRegistration 來處理:

選一張 Reference Image (隨便選一張,不要太差的即可)





使用 PixInsight 來後製,它最強的地方大概就是 Deconvolution 了,但因為無法從影像來產生 PSF 影像(沒有星點),只能用 Try & Err 的方式來微調Shape 及 StdDev 這兩個參數,這是一個關卡,所以從 PixInsight 論壇裡找到一個稍為省事的方法就是先使用 RestaurationFilter 的 WienerDeconvolution 找出最佳的 Shape 及 StdDev 值:

經過幾次的嚐試,Shape = 1.2及 StdDev = 1.75 得到的結果較滿意:
前

後

Deconvolution 就可以使用這個最佳的 Shape 及 StdDev 值:
前

後

把 RestaurationFilter(右上) 與 Deconvolution(右下)產生的結果放在一起做個比較:

ATrousWaveletTransform(初步降噪):
前

後

TGVDenoise(進一步降噪)
前

後

LocalHistogramEqualization(加強對比,降噪後的必要步驟)
前

後

CurvesTransformation(色彩加強):
前

後

- 不同時期生成的岩層造成
- 岩層的礦物成分不同造成
- 或是其他......
CurvesTransformation(反差):
前

後

MultiscaleMedianTransform(進一步強化細節):
前

後

最後再 ICCProfile Transformation 就可以出圖了:

****************************************
附錄:
附錄:早些時候拍攝及後製的回顧
2018年3月24日
Sony A6000+Celetron C90 1250mm + 巴羅三倍鏡--->直焦攝影(相當於 3750 mm的焦距)合成圖:

- 要拍出木星的細節曝光要短,衛星就拍不下來。

- 要拍下木星的衛星曝光要長一些,但木星就會過曝,白成一片沒有細節。



凌晨兩點多上頂樓把火星及土星拍攝下來。


雖說火星及土星已升起,但仍不高,因此星光穿過大氣層的厚度較厚,受到大氣的影響較大,所以拍攝的品質就沒有像木星那樣好。不過,總算看到了久違的土星光環,但與火星一樣,細節完全看不到。
2018年3月26日
拍攝的木星







2018年5月11日
木星在不算高的位置,上面有個小黑點,應該是某顆衛星的影子。



使用 Stellarium 查了一下,小黑點有可能是木衛十五「阿德剌斯忒亞」(Adrastea)或木衛十六「(Metis)

(圖片是「 Stellarium 」模擬拍攝時間(當晚 7:55)的截圖。)
2018年6月28
拍了不少土星的照片,最好的也不過如此:

本以為透過 9 公分口徑焦距 1250 mm 的天文望遠鏡再加上 X2 X3 (總焦距為 1250mm X 2 X3 = 7500mm = 7.5 公尺)各一的加倍鏡配上 32mm 的高亮度目鏡後可以看到卡西尼縫,但極盡目力還是不行--應該是口徑不夠大。
2019年7月13日
以焦距 1900mm 的 BOSMA 天文望遠鏡看木星,目鏡焦距最短只能用到 8mm , 這大概是口徑 13 公分的望遠鏡能夠承受的最大解析力(倍率=1900/8 約 237倍)


(註:照片中目鏡標示為 4mm ,但改成套筒後變為 8 mm)
開始嚐試行星攝影:(木星及土星)
除了季節因素剛好之外,這幾天看木星及土星,由於 13公分口徑的馬卡可能解析力不夠,無法看到更多的細節,然後 Google 一下「行星攝影」,有篇文提到,只要 9 公分以上的鏡子來拍攝,經由後製處理,是可以看到大紅斑的,卡西尼縫也能看到,這才讓我覺得可以來玩玩看。也不必跑山上,在頂樓就可以,只要天氣好就拍攝。
使用的器材:
- Ioptron Cem25p 赤道儀(不需筆電,直接以赤道儀的手柄操作即可。)
- 焦距 1900 mm 口徑13公分的馬卡鏡
- 8mm 的行星目鏡
- SONY A7s 相機(利用它的高 ISO)以 120P 錄製影片。
- 或許還會用到巴羅加倍鏡 2X 或 3X

(手機 iPhone 隨手拍)
後來仔細想了一下,配合 Sony A7s 的 4K 錄影,也買過 ATOMOS Ninja Flame 七吋外接螢幕,剛好可以拿來使用以提高錄影解析度,這樣才可以得到較高畫素的木星及土星。
電力的供應,兩顆飛樂 15000 mah 行電,一顆給赤道儀,一顆給外接螢幕就解決了。
當晚在頂樓有風還蠻涼快,但卻苦了行星的拍攝,在 1900mm 長焦下,以 8mm 目鏡,有著倍率近 240 倍,雖然赤道儀很穩固,但鏡筒大,易受風的影響而抖動,只要風一吹就抖動,後製很難處理,因此當時並未處理。
==>這些素材就是預備用來重新在 Mac 下後製用。
這些素材是以不同的 ISO 值及曝光時間,分別拍攝了六段木星、土星的 4K 影片。
下一次預備以 SONY A7R2 的四千兩百萬高畫素配合電子快門線來拍攝,利用它的高畫素,裁圖後可以得到較大的行星細節,再來疊圖,或許能得到較佳的影像。
從一篇英文Paper:「 High Resolution Astrophotography」,及看了 Bosma 1900mm 的天文望遠鏡規格:分辨率 1.08",最大倍率 345倍,以 1900/345,極限使用的目鏡最短焦距可以是 5.5 mm ,但以台中的空氣的視寧度(大氣穩定及乾淨程度),能夠用上 8mm 的目鏡已是極限。而以台中這樣的視寧度,口徑 13 公分的 Bosma 1900mm 馬卡鏡是綽綽有餘,再長焦距再大口徑也沒用。
2019年7月14日
拍月亮,器材不用大費周章,拍攝也容易,使用攝星儀 + 1250mm 馬卡(不用牛刀,這樣就夠了),採用直焦攝影的方式,也就是不透過目鏡,物鏡進來的光線直接到相機感測器,所以不曉得如何算倍數。

(Kenko Sky Memo S + SONY A7s + ATOMOS Ninja Flame,手機隨手拍,月亮旁還可看到木星。)
- 拍攝了六段影片,分別錄影約一分鐘。
- 進 Aimersoft Video Converter Ultimate CROP 後並轉成1080P 的 AVI 影片。

registax6 疊圖後製(ISO 200 1/80s)

心得:感覺以這種方式拍攝影片再後製的月亮比較有立體感。