(註:在做望遠鏡平衡時一定要用水平儀,若使用目測,誤差會不小,導致偏心重錘很難平衡,之前就是這樣,花了不少時間在平衡上。今晚用了水平儀,偏心重錘三兩下就平衡了。)
預定目標 M27(啞鈴星雲),即使今天是農曆十二,但以 Stellarium 評估它在晚上十二點左右已在東邊夠高的地方,而月亮則已在西下的過程,光害的影響會較小一點,況且在市區,光害本就不小,多這一點應該還好 。
*****************************************
註:
- 使用 APT 來全程拍攝,適用的相機有天文 CCD 相機及 Canon、Nikon 的 DSLR相機,那麼 SONY 相機是否就無法用來深空攝影?答案當然是否定的!在「觀測日記」裡也曾使用 SONY A7s ,如這篇即是,只是沒有如使用 APT 那樣行雲流水般地一氣呵成。使用者必須使用SONY 的 Imaging Edge Desktop 以 USB 線連接相機來遙控拍攝;以 LiveView 放大並配合「魚骨對焦板」來對焦;以 AstroTortilla 來一星校正及拍攝目標定位。當然,拍攝中 PHD2 也要一起啟動導星。
- 關於如何設定 AstroTortilla 來使用 SONY 相機?其實很簡單,借用一張在「觀測日記」裡的圖來說明,只要設成如藍色框的項目即可,而操作煩瑣一點,如下:

- 先手動大致找到一顆亮星(不必是預定的校正星,因為還未一星校正,GOTO 很不準確)以 LiveView 放大來粗對焦(不然 AstroTortilla 會無法解析)
- 假設要以織女星來一星校正並對焦:赤道手柄執行一星校正程序,選織女星,然後赤道儀會將望遠鏡指向它(但不準確,甚至有可能不在相機視野內),接下來以 Imaging Edge Desktop 拍攝一張影像(ISO 設成 1600、3200 都可以,曝光大概 5-15 秒就可以了,使用 JPG 格式)
- 點選 AstroTortilla 的「Capture and Solve 」會開啟讀取檔案的對話盒,選擇剛剛拍攝的檔案,然後 AstroTortilla 就會開始解析。成功解析後, AstroTortilla 會指揮赤道儀把望遠鏡精準地把織女星定位到相機的視野中心,這時可以按下赤道儀手柄的 Enter 鍵來確認一星校正。
- 現在可以把「魚骨對焦板」放上望遠鏡,在 Imaging Edge Desktop 以LiveView 放大(ISO 可以設成 6400 甚至 12800,曝光設 10-25 秒,能夠清楚看到即可),確認對好焦點,就可以再次使用 AstroTortilla 來定位到拍攝目標,如本文的 M27。
- 以赤道儀的艾頓指揮家直接 GOTO 到 M27(甚至也可以在手柄操作,不管任何廠牌的赤道儀應該會有的基本功能)
- 以 Imaging Edge Desktop 拍攝一張影像(ISO 設成 1600、3200 都可以,曝光大概 5-15 秒就可以了,使用 JPG 格式)
- AstroTortilla 定位到拍攝目標 M27
- Imaging Edge Desktop 設定長時間拍攝影像:BULB(90s-300s)、ISO 640(A7R2 的最佳天文 ISO)、張數、RAW 拍攝。
*****************************************
十一點把器材搬上頂樓並組裝
極軸校正:使用電子極軸鏡,兩三分鐘即能搞定。校正時不必開啟赤道儀,這樣等校正完畢再開啟,赤道儀即處於零位位置。
導星鏡、相機、赤道儀設備的連接線現在可以接上筆電
先開啟 PHD2 再開啟 APT
一星校正及對焦:織女星為目標星
初時先以 APT 拍攝(先調到前次的對焦位置 23583),ISO 1600 5s


PoingCraft 定位到 M27 (ISO 1600 5s 就可以了)

整個前置過程大概四十幾分鐘。這次 PHD 2 不再 Calibration 及 Guide Asstant ,所以在十一點四十四分就完成了第一張的拍攝,至凌晨兩點半順利完成拍攝,總共拍了 ISO 400 曝光 90秒 的影像六十張,設了 Dither 30秒,所以花費時間較長,但可以省下拍攝 Darks 的時間。
底下是拍攝中的截圖:

先睹為快,單張簡單後製(只截取 M27 部分):

好久沒用 PixInsight,都快忘了!!!
由於之前莫名其妙被 01 停權,所以賭爛不再上 01,憑著記憶,以 PixInsight 開始後置處理拍好的六十張影像......
在前置作業(pre-processing of images)的部份,於 ImageCalibration 只能套用事先已做好的 Master Superbias,沒有拍 Darks 及 Flates ,當然也就沒有勾選 Master dark 及 Master flate ,但由於是以 Dither 拍攝,Darks 是可以不用拍了,至於 flate 不拍是因為之前拍了,但似乎沒有作用,很多的髒污在後製時都被強化而變得很明顯,最後不得不動用 PixelMath 來消除。倒是對於這點有必要未來好好研究,難道非得現場拍攝完 Lights 後,以同樣的對焦位置、溫度拍攝平場嗎?

CosmeticCorrection
Debayer
等到要使用 SubframeSelector 時,再也無法堅持了,只能經由自己 Blog 裡的這篇文章的連結上 01 看自己寫的文章。
StarAlignment
LocalNormalization
ImageIntegration process
但在進入到 DrizzleIntegration 發覺在 01 的文章裡附的圖是錯誤的,再仔細閱讀原文後確認下圖 Enable Local Normalization 要勾選才是正確的設定,不勾選,前面做的 LocalNormalization 可就做白工了,像這次有 60 張影像, 以 2018 Mac mini 六核的 i7 32GB Ram 全速衝刺的結果,也要花二十幾分鐘才完成(開了 eGPU PixInsight 完全沒用到):

由於個人的堅持,01 自己寫的文章還是會參考(畢竟那是自己的筆記),但決不再登入!!!所以訂正就寫在這裡了。
DynamicCrop 後影像還有 3932X3172
把光害濾鏡邊框的部分裁掉,由於 2X Drizzle 過,再多裁了一些。
下圖是 100%下,Drizzle(左) 與沒有Drizzle(右)的比較(沒有Drizzle的影像在疊圖後未進一步處理,只是用來比較 M27 的大小)

DynamicBackgroundExtraction
PhotometricColorCalibration(會順便 BackgroundNeutralization)

PCC 前:

PCC 後:

先附上 PhotometricColorCalibration 處理過的影像,這還在中間過程,真正的影像後製到此才算要開始:(如果單張後製的算 60分,到這裡應該有 90分了,但接下來的複雜後製過程所需的時間與心力大概要前面的兩三倍,而最終的結果了不起最多進步個 5 分而已,可這 5 分卻是很有挑戰性。)
 上傳 Astrometry.net 加上標註名稱:
上傳 Astrometry.net 加上標註名稱:

SCNR
DynamicPSF
取樣點大概選在影像中央附近、四個角落、四個邊的中央,選取的星點不要太大也不要太小,避免有光暈的星點, 儘量點在星點的中央。
註:
關於 PSF 的原理,可以在維基百科查到(英文說明),也可以從這篇文章看到較清楚的中文說明,不過一大堆微積分式子就略過了,文字說明看看,大致知道是怎麼一回事就好了。
選了一百多個取樣點,需要進一步篩選(以 A (Amplitude), r (Aspect Ratio) 及 MAD (Mean Absolute Difference) 來做為篩選的依據):

首先以 MAD (Mean Absolute Difference) 來做篩選,點選圖中藍色小箭頭的排序圖示,在對話盒選 Mean Absolute Difference:

 根據 MAD 值,大致瀏覽了全部資料,查得在 1.011e-03~1.193e-03 區間有著較多的取樣點,因此把其他的刪除,留下21 個取樣點。
根據 MAD 值,大致瀏覽了全部資料,查得在 1.011e-03~1.193e-03 區間有著較多的取樣點,因此把其他的刪除,留下21 個取樣點。
進一步以 A (Amplitude) 來篩選,選取範圍最好落在 0.25 ~ 0.75 間,選最接近這個範圍的 9 個,其他的刪除。

最後再以 Aspect Ratio 篩選,選取範圍最好落在 0.6 ~ 0.8 間,9 個取樣點只剩三個在這個範圍內,其他刪除。

全選這些剩下的 3 個,然後點選 Export 圖示,得到下圖右的 PSF 影像,先存檔,等星雲 Mask做好後,就可以被 Deconvolution 來參照使用。

關於 Deconvolution ,可以消除掉一些由於大氣擾動產生的形變( distortion),使影像更清晰(並非銳利,這篇文章解釋了兩者在數學上是不同的演算法),在維基百科上的英文說明:「...used to enhance signals from recorded data」即表明並非銳化。
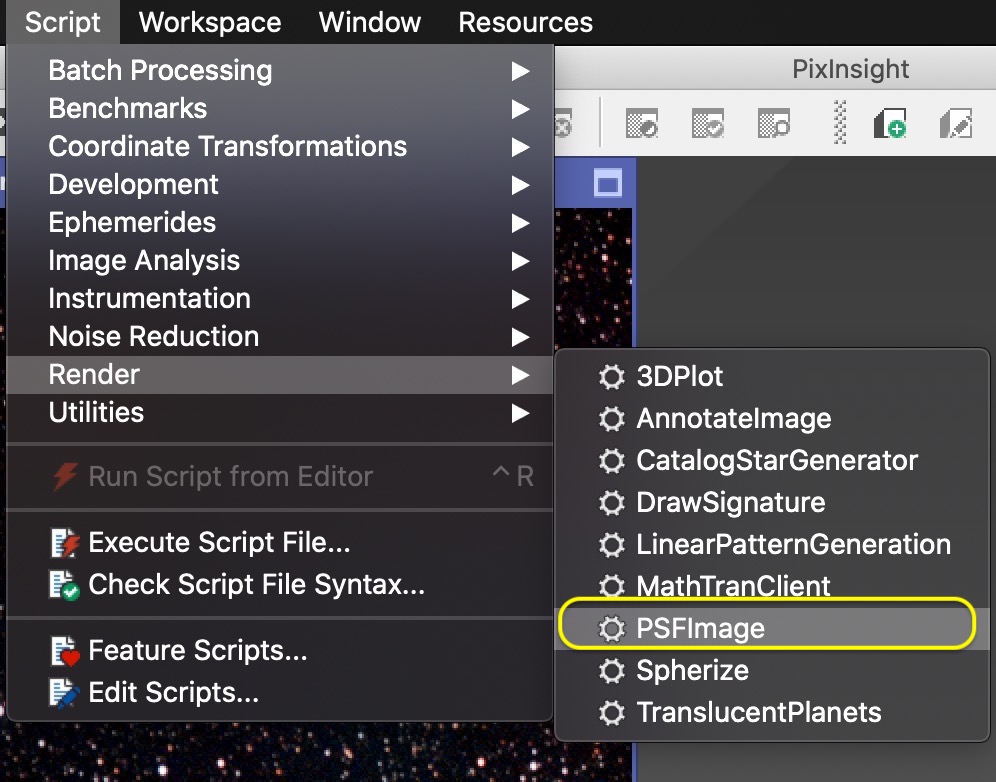
為了找出那種方法可以做出最佳的星雲 Mask 才能進行 Deconvolution ,在 YouTube 找到這支影片,了解到需要製作兩個 Mask,一個給 Local deringing 用;一個用來防止背景的雜訊被強化。後來又找到這支影片,方法步驟上大致與上支影片的說明相同,但這支影片還提到了有支可以自動產生 PSF 的 PSF image creator script 可以使用,前往下載並按照網頁說明安裝:

於是重新以它來產生 PSF 影像:
1. 開啟後先執行 Evaluate ( 以預設值即可,不用改動)
 2.再按 Create 即可產生所要的 PSF 影像(快速又方便)
2.再按 Create 即可產生所要的 PSF 影像(快速又方便)

底下是之前以手動方式的 PSF影像(上圖),PSF image creator script產生的 PSF影像(下圖):

決定以新產生的 PSF影像來給 Deconvolution 用(畢竟以老花的肉眼來選擇取樣點一定誤差較大)。
以 StarMask 製作 Local deringing 用的 Mask:(只改了紅框內設定,其他預設值都不動;這是用來防止較亮的亮星產生黑圈)

防止背景雜訊被強化的 Mask 製作:
1.先從彩色影像把「明度」截取出來
2.以此明度(L)影像,以 HistogramTransfermation 調整黑點及灰點,讓星雲保留最多的細節但把背景雜訊濾除。
 下圖是前後比較圖:
下圖是前後比較圖:

都準備好了,現在可以Deconvolution ......
Deconvolution :
如圖:
 1.設 External PSF ,然後在 View Identifer 選擇製作好的 PSF 影像。
1.設 External PSF ,然後在 View Identifer 選擇製作好的 PSF 影像。
2.Iterations 先使用 12 的預設值,等到得到滿意的結果後再來增加,通常不要大於 100。
3.Global Dark 預設值太大,先調小,再來慢慢調整。
4. 勾選 Local deringing ,並選好 StarMask 製作的 Mask。
5.其他的預設值不動
底下是未 Deconvolution 前的情形:

Deconvolution 後的情形(經過多次的調整 Global Dark 0.0042 Iterations 35 的結果較意):

後製到現在的影像大概可以打 92分(與前面 90 分的有差別嗎?):

ATrousWaveletTransform(Linear 下的初步降噪):
大致參考了這支影片製作 Mask 的方法,並在Herbert Walter PixInsight Scripts 網站,依說明下載及安裝所有的 Scripts。
1.先從彩色影像把「明度」截取出來
 2.以Herbert Walter PixInsight Scripts 裡的 AdvStarmask 不用調整參數,一鍵產生。
2.以Herbert Walter PixInsight Scripts 裡的 AdvStarmask 不用調整參數,一鍵產生。

 3.反轉截取出來「明度」影像
3.反轉截取出來「明度」影像
 4.以 PixelMath 將反轉後「明度」影像與 Starmask 影像相加,並設定產生新影像。
4.以 PixelMath 將反轉後「明度」影像與 Starmask 影像相加,並設定產生新影像。

 5.反轉 PixelMath 相加後的影像
5.反轉 PixelMath 相加後的影像
 6.反轉後的影像以 HistogramTransformation 調整
6.反轉後的影像以 HistogramTransformation 調整
 7.將這個影像做為 Mask 並反轉。
7.將這個影像做為 Mask 並反轉。

 8.現在可以ATrousWaveletTransform 針對背景來降噪而不影響星雲及星點
8.現在可以ATrousWaveletTransform 針對背景來降噪而不影響星雲及星點


ScreenTransferFunction+HistogramTransfermation (Linear Stretching to Non-linear)

TGVDenoise(Non-linear下降噪)前後對比


LocalHistogramEqualization(加強對比,降噪後的必要步驟)


接下來按正規步驟應該在 PI 下以 ColorSaturation 或 CurvesTransformation 來做色彩加強,但後來知道在 PS 下增加一個 Black & White 調整圖層,然後 Blend 選 Luminosity ,就可以調出想要的色彩,所以就取個巧,在 PS 下完成這個部分:
1.先將前面 LHE 後的影像轉存成 16 bits 的 Tiff 影像
2.前面步驟已做好的星雲 Mask 也轉存成 16 bits 的 Tiff 影像
3.PS 開啟上述兩個檔案,在 M27 影像新增一個 Black & White 調整圖層,然後依這支影片的說明,把星雲 Mask影像做成 Black & White 調整圖層的Mask,調整各個顏色讓星雲達到自已最滿意的程度。

 4.再增加一個 Curves 調整圖層來得到最佳反差對比。
4.再增加一個 Curves 調整圖層來得到最佳反差對比。

 5.存成 Tif 檔送回 PI 進一步縮小星點。
5.存成 Tif 檔送回 PI 進一步縮小星點。
MorphologicalTransformation 縮小星點

ICCProfile Transformation(輸出影像發表在網路上)

與之前中間過程做個對比,應該可以從92分進步到 95分了吧?!

檢討:
這次的拍攝與後製,沒有用到暗場及平場,沒想到在後製的過程中竟然不再碰到那如滿天雨下的污點,可見得之前製作的暗場及平場很有問題。這次的後製碰巧發現這個現像,反而增加未來拍攝的方便,只要以 Dither 拍攝即可不用拍攝暗場,而事後的平場不拍攝也不會影響最後的影像。
現在就等天氣轉好,才能再拍攝下一個目標.................
由於之前莫名其妙被 01 停權,所以賭爛不再上 01,憑著記憶,以 PixInsight 開始後置處理拍好的六十張影像......
在前置作業(pre-processing of images)的部份,於 ImageCalibration 只能套用事先已做好的 Master Superbias,沒有拍 Darks 及 Flates ,當然也就沒有勾選 Master dark 及 Master flate ,但由於是以 Dither 拍攝,Darks 是可以不用拍了,至於 flate 不拍是因為之前拍了,但似乎沒有作用,很多的髒污在後製時都被強化而變得很明顯,最後不得不動用 PixelMath 來消除。倒是對於這點有必要未來好好研究,難道非得現場拍攝完 Lights 後,以同樣的對焦位置、溫度拍攝平場嗎?

CosmeticCorrection
Debayer
等到要使用 SubframeSelector 時,再也無法堅持了,只能經由自己 Blog 裡的這篇文章的連結上 01 看自己寫的文章。
StarAlignment
LocalNormalization
ImageIntegration process
但在進入到 DrizzleIntegration 發覺在 01 的文章裡附的圖是錯誤的,再仔細閱讀原文後確認下圖 Enable Local Normalization 要勾選才是正確的設定,不勾選,前面做的 LocalNormalization 可就做白工了,像這次有 60 張影像, 以 2018 Mac mini 六核的 i7 32GB Ram 全速衝刺的結果,也要花二十幾分鐘才完成(開了 eGPU PixInsight 完全沒用到):

由於個人的堅持,01 自己寫的文章還是會參考(畢竟那是自己的筆記),但決不再登入!!!所以訂正就寫在這裡了。
DynamicCrop 後影像還有 3932X3172
把光害濾鏡邊框的部分裁掉,由於 2X Drizzle 過,再多裁了一些。
下圖是 100%下,Drizzle(左) 與沒有Drizzle(右)的比較(沒有Drizzle的影像在疊圖後未進一步處理,只是用來比較 M27 的大小)

DynamicBackgroundExtraction
PhotometricColorCalibration(會順便 BackgroundNeutralization)

PCC 前:

PCC 後:

先附上 PhotometricColorCalibration 處理過的影像,這還在中間過程,真正的影像後製到此才算要開始:(如果單張後製的算 60分,到這裡應該有 90分了,但接下來的複雜後製過程所需的時間與心力大概要前面的兩三倍,而最終的結果了不起最多進步個 5 分而已,可這 5 分卻是很有挑戰性。)


SCNR
DynamicPSF
取樣點大概選在影像中央附近、四個角落、四個邊的中央,選取的星點不要太大也不要太小,避免有光暈的星點, 儘量點在星點的中央。
註:
關於 PSF 的原理,可以在維基百科查到(英文說明),也可以從這篇文章看到較清楚的中文說明,不過一大堆微積分式子就略過了,文字說明看看,大致知道是怎麼一回事就好了。
選了一百多個取樣點,需要進一步篩選(以 A (Amplitude), r (Aspect Ratio) 及 MAD (Mean Absolute Difference) 來做為篩選的依據):

首先以 MAD (Mean Absolute Difference) 來做篩選,點選圖中藍色小箭頭的排序圖示,在對話盒選 Mean Absolute Difference:


進一步以 A (Amplitude) 來篩選,選取範圍最好落在 0.25 ~ 0.75 間,選最接近這個範圍的 9 個,其他的刪除。

最後再以 Aspect Ratio 篩選,選取範圍最好落在 0.6 ~ 0.8 間,9 個取樣點只剩三個在這個範圍內,其他刪除。

全選這些剩下的 3 個,然後點選 Export 圖示,得到下圖右的 PSF 影像,先存檔,等星雲 Mask做好後,就可以被 Deconvolution 來參照使用。

關於 Deconvolution ,可以消除掉一些由於大氣擾動產生的形變( distortion),使影像更清晰(並非銳利,這篇文章解釋了兩者在數學上是不同的演算法),在維基百科上的英文說明:「...used to enhance signals from recorded data」即表明並非銳化。
為了找出那種方法可以做出最佳的星雲 Mask 才能進行 Deconvolution ,在 YouTube 找到這支影片,了解到需要製作兩個 Mask,一個給 Local deringing 用;一個用來防止背景的雜訊被強化。後來又找到這支影片,方法步驟上大致與上支影片的說明相同,但這支影片還提到了有支可以自動產生 PSF 的 PSF image creator script 可以使用,前往下載並按照網頁說明安裝:
於是重新以它來產生 PSF 影像:
1. 開啟後先執行 Evaluate ( 以預設值即可,不用改動)


底下是之前以手動方式的 PSF影像(上圖),PSF image creator script產生的 PSF影像(下圖):

決定以新產生的 PSF影像來給 Deconvolution 用(畢竟以老花的肉眼來選擇取樣點一定誤差較大)。
以 StarMask 製作 Local deringing 用的 Mask:(只改了紅框內設定,其他預設值都不動;這是用來防止較亮的亮星產生黑圈)

防止背景雜訊被強化的 Mask 製作:
1.先從彩色影像把「明度」截取出來
2.以此明度(L)影像,以 HistogramTransfermation 調整黑點及灰點,讓星雲保留最多的細節但把背景雜訊濾除。


都準備好了,現在可以Deconvolution ......
Deconvolution :
如圖:

2.Iterations 先使用 12 的預設值,等到得到滿意的結果後再來增加,通常不要大於 100。
3.Global Dark 預設值太大,先調小,再來慢慢調整。
4. 勾選 Local deringing ,並選好 StarMask 製作的 Mask。
5.其他的預設值不動
底下是未 Deconvolution 前的情形:

Deconvolution 後的情形(經過多次的調整 Global Dark 0.0042 Iterations 35 的結果較意):

後製到現在的影像大概可以打 92分(與前面 90 分的有差別嗎?):

ATrousWaveletTransform(Linear 下的初步降噪):
大致參考了這支影片製作 Mask 的方法,並在Herbert Walter PixInsight Scripts 網站,依說明下載及安裝所有的 Scripts。
1.先從彩色影像把「明度」截取出來












ScreenTransferFunction+HistogramTransfermation (Linear Stretching to Non-linear)

TGVDenoise(Non-linear下降噪)前後對比


LocalHistogramEqualization(加強對比,降噪後的必要步驟)


接下來按正規步驟應該在 PI 下以 ColorSaturation 或 CurvesTransformation 來做色彩加強,但後來知道在 PS 下增加一個 Black & White 調整圖層,然後 Blend 選 Luminosity ,就可以調出想要的色彩,所以就取個巧,在 PS 下完成這個部分:
1.先將前面 LHE 後的影像轉存成 16 bits 的 Tiff 影像
2.前面步驟已做好的星雲 Mask 也轉存成 16 bits 的 Tiff 影像
3.PS 開啟上述兩個檔案,在 M27 影像新增一個 Black & White 調整圖層,然後依這支影片的說明,把星雲 Mask影像做成 Black & White 調整圖層的Mask,調整各個顏色讓星雲達到自已最滿意的程度。




MorphologicalTransformation 縮小星點

ICCProfile Transformation(輸出影像發表在網路上)
6月3日晚拍攝的 M27 啞鈴星雲總算後製完成

與之前中間過程做個對比,應該可以從92分進步到 95分了吧?!

檢討:
這次的拍攝與後製,沒有用到暗場及平場,沒想到在後製的過程中竟然不再碰到那如滿天雨下的污點,可見得之前製作的暗場及平場很有問題。這次的後製碰巧發現這個現像,反而增加未來拍攝的方便,只要以 Dither 拍攝即可不用拍攝暗場,而事後的平場不拍攝也不會影響最後的影像。
現在就等天氣轉好,才能再拍攝下一個目標.................
沒有留言:
張貼留言
您可以留下意見,但 Luke 可能無法馬上回覆,尚請見諒。