觀測日記
2018.09.30
必須承認,到目前為止,還是「儀器校正階段」--- 後面的路還很長......
-----------------------------
昨晚看天空很佳,七點直上頂樓練習,到凌晨約兩點結束(雲又多了)。
這張大概是昨晚最佳的成果: M 42 獵戶座大星雲 曝光 45 秒,5 張疊圖,4 張暗場,Affinity Photo 影像處理。比起之前使用 Kenko 攝星儀在寒風中拍攝的都來得好。

整晚練習得到一個教訓:平衡、平衡、平衡,真的得說三次,因為整晚就重新調整了三次平衡。這台 iOptrom Cem25P 的設計比起德式赤道儀優秀太多,唯一的缺點大概就是對於平衡的要求太敏感了,這方面吃了不少苦頭,未來調整平衡得要一絲不苟才行。還有許多其他的小細節也要注意,眉眉角角在天文攝影時都會放大而致影響成品的成像。 底下這張 M 31(下圖)是昨晚拍了二十幾張曝光五分鐘,只有 15 張可用(因為導星不是很穩,底下是截取幾張的過程曲線圖,突然起伏即會導致影像拖線或重影而失敗),疊圖並經影像處理,總曝光時間相檔於一小時多,與之前總曝光時間二小時的影像來比較,可以看到細節反而更多,這是因為單張曝光的時間從三分鐘變為五分鐘的關係。

 |
 |
 |
 |
 |
 |
這次練習得到的心得除了赤道儀平衡的教訓外,導星的精度關係到單張影像曝光時間的長短,越長,可以得到的細節越多,雖然可以拍攝多張來累積總曝光時間,但那也只是增加訊噪比,沒有拍到的細節,怎麼處理都是無法憑空跑出來的。
如何提高導星的精度與穩定度(在頂樓,有可能因為光害影響、大氣視相不佳造成的),有需要到沒有光害的地方實際驗證。
另外也在猜想,是否赤道儀的一星校正或三星校正(在頂樓始終無法完成,總有一顆被建築物擋住)會影響到導星的精度,這點得到山上時才能驗證了。
還有主鏡、導星鏡與極軸望遠鏡光軸的一致(平行)是否也會影響導星的精度也有待測試。(註:觀測時本就了解這三樣器材的光軸並不一致,想說導星時會修正而不理會,為了排除是否這個小細節影響到導星,特定找了一些墊片塞入主鏡相機座及導星鏡鳩尾座,讓主鏡、導星鏡與極軸望遠鏡光軸三軸能夠平行,並以鉗子把器材的各個螺絲鎖緊,之後再來測試,可惜今晚天空雲多無法測試。)
拍到凌晨一點多時,看到獵戶座也升起了,於是把鏡頭 GOTO 過去,再以 AstroTortilla 精確定位,到此一切順利。
AstroTortilla 真是越用越順。
由於獵戶座大星雲 M42 仰角仍低(約 30 度)受光害影響嚴重,曝光超過 30 秒就過曝了。 在拍攝過程中竟然 30 秒的曝光導星都失敗,只好不用導星以赤道儀來追踪,30 秒及 45秒在 600 mm焦段下的曝光還不致拖線。看看時間也差不多了,筆電也快沒電了,剩餘的電量就用來拍暗場順便收工。
這個練習又了解到變換目標後,赤道儀指向不同天區可能需要重新 Calibration ,不然為何前一個 M31 曝光 5 分鐘都還沒問題,改成 M 42 就連 30 秒都有問題?
2018.09.27
昨晚近六個小時的導習練習以失敗作收。 光是第一步的校正 Calibration 就過不了關,硬是要導星,曲線數據也很難看。唯一得心應手的是 AstroTortilla 的定位目標星,37 秒便完成定位。

追究會有這樣的結果,可能是主鏡部分沒有做好平衡的關係。安裝相機、鏡頭及導星鏡的鳩尾板太短,要固定在赤道儀上便無法完全平衡(缺了一個長的鳩尾板),想說可能沒甚麼影響,但測試的結果讓我知道小看了這台 iOptron Cem25P 赤道儀對平衡的敏感。之前 200mm 的導星鏡較輕,還能達成平衡,這次換成 Pentax Takuma 300mm F4 重量增加不少,稍為有點不平衡就不行。因此重新改回最初的組合方式,今晚若天空許可,再來測試看看。

2018.09.26
中秋夜花了七小時(晚上八點直到隔天凌晨三點)在頂樓賞月,不,應該說拍照,順便賞月。說不定會被月亮曬黑--聽說月亮曬黑是白不回來的。
總共拍攝了天體影像 68 張(拍了71張,挑選可用的,單張曝光 2 分鐘),相當於總曝光時間 2 小時 16分;另外還拍了暗電流影像 15張、平場 30 張、偏壓 45 張,進疊圖軟體 DSS 處理後,再經影像處理。 畢竟是 600mm 拍的,所以 M31 較之前 200 mm 拍的要大些,因為總曝光時間也加長了,所以細節也增加了,只是需要花時間影像處理,把這些細節拉出來。

M31 大概只能調到這樣子。市區與中秋滿月的光害,增加曝光時間有點幫助,但看來選個農曆月初的日子,找個沒有光害的地方拍才是王道。下一個目標挑戰「馬頭星雲」,這在社區頂樓應該是辦不到的,得到無光害的地方才行。
整晚的拍攝分成兩個階段(因為 M31 過中天),第一階段正常拍攝,第二階段使用 Dither 技術拍攝(加了dither 拍攝時間會多近半小時),只拍了二十張,就因為汽車行車電源電力用完了。 大概等筆電電力剩四十幾 %時,以一分鐘約 1 % 掉電時,看看可能無法拍完,所以趕緊把筆電充電線接上汽車行動電源,然後等筆電充到約 78%時,赤道儀停了,這才發現筆電把汽車行動電源的電力搾乾了,這時約凌晨三點,只得收工。(這個經驗讓我得到一個教訓,筆電非萬不得已,剩不到 10 %時才插入汽動行動電源充電。) 收拾器材時,發覺此時雲也多起來了,還真巧,就算行動電源還有電,也是要收工的。
使用 AstroTortilla 來定位 M 31實在太方便了,不到一分鐘就可以把 M31 擺到影像中心。

過程中的 PHD2 導星數據如下:
 |
 |
拍出來的M 31 成品勉強接受,但星點有點肥(些微拖線),表示導星還不夠精準。拍攝主鏡為為 Sigma 150-600mm @ 600mm ,使用的導星鏡為 200mm F4 ,或許因此不夠精準,這兩天趁颱風未來且秋高氣爽時,把導星鏡改成 Pentax Takuma 300mm F4 來練習看看是否導星的精度可以提高。因為是練習,就不管光害了,目標還是 M 31,若練得晚了,搞不好還可以順便再改成 M42 獵戶座大星雲來練習。

練習器材:含Nikon D61+ Sigma 150-600mm + Pentax Takuma 300mm F4 + 導星 CCD + 鳩尾座及延伸板 共 4970 克,這對 iOptron Cem25P 可承重 12.6 公斤,即使 PHD2 導星程式的作者指出要能導星需把赤道儀的承重範圍打個五折的情形下,仍然綽綽有餘。
自己拍的不行,只好去找了中研院王為豪博士在山上無光害地區拍的 M31 仙女座大星系來解解饞。取得的是原始拍攝的 RAW 影像檔(他開放供人取用練習),單張曝光三分鐘,共25張,暗場15張,平場 30 張,偏壓 10 張。 下載後使用 DSS 疊圖,再經由 Affinity Photo 以 Curves 來處理疊圖後的 32位元Tiff 影像檔(Photoshop CS6 要先轉成 16 位元才行),初步的處理就已經非常好了。

2018.09.24
重新把2018.09.18 拍攝的 M31 以 Affinity Photo 處理,然後再除光害,看起來比之前順眼多了。(這次是裁圖後再處理,效率就好多了)

2018.09.22
昨晚多雲無法上頂樓練習,趁著 ispring 螢幕錄製程式試用還未到期,就把如何去除光害的過程錄了下來。影片很長,在去除星點的過程可以快轉。因為不懂日文,也不曉得修正的部分是否能另外存檔,不然就可以讓影像更盡善盡美。(影像中光害去除掉的部分較黑且有點藍,應該在「補正」時 B 再設得小一些才對)
2018.09.21
很難相信這是在台中市的社區頂樓拍攝的 M31 仙女座大星系(註:這是原圖,可以下載後放大)

這張其實就是2018.09.18 拍攝的 M31,花了一個下午,使用一支日本人寫的除光害程式(如何操作可以參考這篇文章),很有耐心地處理,才得到上圖這張影像,操作過程截了兩張圖。
 |
 |
2018.09.20
M 31 仙女座大星系總算出現了,這是 1:1 的局部截圖。

(仙女座星系是一個螺旋星系,距離地球大約250萬光年,是除麥哲倫雲以外最近的星系。位於仙女座的方向上,是人類肉眼可見最遠的深空天體。 仙女座星系被相信是本星系群中最大的星系,直徑約20萬光年,外表頗似銀河系。本星系群的成員有仙女星系、銀河系、三角座星系,還有大約50個小星系。 維基百科) 想要拍出 M 31 仙女座大星系的螺旋,那是非得要上合歡山不可!
在上圖裡也看到連 M110 也拍到了,它是一個橢圓星系,是M31第二明亮的伴星系,也是本星系群的一員。M110距離地球約220萬光年,視亮度8.5等,總質量估計為10億太陽質量。
拍攝了近七十張 45秒的影像,可以用來疊圖只剩 64 張,這樣疊出來的影像相當於曝光 49 分鐘。

M31 在整個的影像其實佔相當的小的比例,因為用的是 200mm 的相機鏡頭拍的,疊完的圖經過影像處理,除了讓M 31 仙女座大星系現出原形,也顯現出台中市即使在深夜光害還是超嚴重的。

---------------------------------------------------------
晚上到小學走操場時看天空很佳,十點左右上頂樓,這次帶上 Nikon D610 + Celestron C90 (1250mm F14)。 由於 C90 光圈太小,對焦及 AstroTortilla 解析定位很難搞,弄了兩個多小時才算搞定,開啟 PHD2 導星,然後使用 BackyardNikon 計畫:ISO 640 、曝光五分鐘,預備拍個 30 張,大概凌晨兩點多可結束。
這樣的長焦下, AstroTortilla 還真能解析定位到影像中心,只是需要曝光到兩分鐘才能有足夠的星點讓它解析。 結果才拍了一張,M31 剛好過中天,赤道儀停住了,無法繼續拍攝。只好歸回零位,再 GOTO 到 M31 ,並以AstroTortilla 重新解析定位,還沒搞定竟然雲層起來了,而且剛好是 M31 所在的天區。看雲層似乎越來越密,只好收工。
整晚的收穫只有一張五分鐘的影像,無法疊圖去雜訊,實在很難看,而且五分鐘曝光又長焦 (1250mm),雖有導星,星點還是略有拖線,如圖,即使縮圖了,雜訊噪點多又明顯。

2018.09.19
昨天白天天氣不錯,到了晚上七點多在小學走操場,天空又佈滿雲,想說今晚大概沒望了,十點洗完澡後上頂樓,雲層有些散開的樣子,但不抱希望。十一點半純脆只是隨便看看心情上頂樓,沒想到雲層真的散開了,可「夜已三更」,搬動器材會不會吵到隣居,也不曉得會不會器材搬上頂樓,雲又再度起來,猶豫了一陣子,十二點決定把器材搬上去,反正陶侃搬磚也不是一次兩次,不差這一次。
因為上頂樓的時間有點晚,所以操作上顯得有些急躁,零位的設定就略過(已在室內大致設定過,在赤道儀上畫上記號),平衡也大致調了一下,開始用電子極軸鏡校正極軸,初時赤道儀沒擺好,北極星不在電子極軸鏡視野內,幾次校正失敗後才發覺。調整赤道儀位置讓北極星進入電子極軸鏡視野內,很快就把極軸校正好。
接下來要做「一星校正」,忘了把有照明十字線的目鏡帶上來,直接以導星 CCD 來校正。由於織女星已被建築物擋住,只好選第二順位的五車二。當赤道儀驅動鏡頭指向五車二後,電腦螢幕看不到,有可能是導星 CCD 的 ISO 及 Gain 沒設好,也可能是零位設定的誤差太大的關係。有預感今晚利用 AstroTortilla 的解析定位應該可以成功,反正「一星校正」也只是校正零位誤差,把這個步驟略過也不會影響拍攝的。
把赤道儀、導星 CCD接上筆電,執行 iOptron Commander 來連線赤道儀,再執行 StellariumScope 與 Stellarium,在 Stellarium 尋找 M31 並 GOTO 過去。 再啟動 BackyardNikon 與 AstroTortilla ,做好 AstroTortilla 的初步設定,然後再指揮 BackyardNikon 以 Nikon D610 拍攝, AstroTortilla 讀入這張影像加以解析,結果竟然又失敗了.............
進入 BackyardNikon 看看拍攝的影像才發覺根本沒對好焦點,怪不得 AstroTortilla 無法解析。只好以赤道儀手柄讓鏡頭先返回零位再 GOTO 到 M31 附近天區的亮星「五車二」來對焦。初時還是無法落入相機視野內,只好將鏡頭調至 70mm 擴大視野,找到後再調到 200 mm (註:這支Sigma 70-200mm F2.8 有點麻煩,五車二在 70mm 的視野中心時,調大焦距時,又會跑出視野,只能慢慢加大一點焦距,然後用手柄調回視野中心,直到調為 200 mm 為止。)接下來便可以在 BackyardNikon 裡利用 FWHM 把焦點調好。
切換到 Stellarium,尋找 M31 並 GOTO 過去。
切換到AstroTortilla ,再度指揮 BackyardNikon 以 Nikon D610 拍攝, AstroTortilla 讀入這張影像加以解析,由於焦點已對準,這次用不到兩分鐘就解析成功(如圖)並驅動赤道儀將鏡頭指向真正 M31 位置,再度拍攝一張,M31 確定就在影像中心了。

在赤道儀已鎖定 M31 並持續追踪時,啟動 PHD2 來導星並準備開始拍攝。在網路看到國外使用者大都說先要讓 PHD2 導星個十來分鐘,等曲線穩定下來才開始拍攝,但因為時間也晚了,加上也沒有要拍攝很長的曝光時間,馬上就開拍:在深夜,台中市夜空的光害還是很嚴重,即使 Nikon D610 已加裝了內置型的 STC 的光害濾鏡,最多只敢設到單張曝光 45 秒。(光害濾鏡對於濾除都市路燈--鈉燈等特定波段的光源有較好的效果,但對於全波段的 LED 燈就沒轍了,等台灣路燈全面 LED 化後,連光害濾鏡都成廢物,屆時要天文攝影只得往山上了。)
第一個 30 張順利拍攝完成,拍攝期間使用虛擬桌面在 PHD2 與 BackyardNikon 間切換以監看,結果在拍攝完 30 張後 BackyardNikon 當掉了,重新再執行幾次都是拍了兩三張就結束,最後讓 PHD2 與 BackyardNikon 在同一個桌面執行,切換監看即不再出現問題(看來得把虛擬桌面拿掉,說不定下次使用 Nikon 相機假電池時也不會有問題,值得下次的練習試試看)。 順利地再拍完 30 張每張曝光 45 秒的影像。
監看 PHD 2導星,發覺並不是很平順,曝光 45 秒星點還不致拖線,但要曝光一分鐘以上恐有問題,加上因齒輪問題的週期誤差,導星的提高精度是未來練習的重點。 這時已來到凌晨三點十分, BackyardNikon 設定拍攝 10 張暗場影像,拍攝中一邊收拾器材,等一切收好也剛好拍完暗場影像,再把器材小心翼翼地搬回家裡,剛好凌晨三點半。
2018.09.18
前幾天大費周章把器材搬上頂樓且熬夜拍攝 M31 仙女座大星系,結果因為相機鏡頭未校正與赤道儀的極軸平行,偏差太大以致於未將 M31 拍入視野內。
找到了一個網站(Astrometry.net)
可以將拍攝的影像上傳(為 9/13 拍攝的一張)

經該網站解析後可以再加註星名

這樣就可以 Stellarium 比對後了解到並未將 M31 拍到(紅框即是相機的拍攝範圍,沒有拍到 M31)

2018.09.17
今年三月在卓蘭以 Kenko 攝星儀拍的獵戶座星雲,重新疊圖及影像處理。(西部地區,光害還是太嚴重)

拍攝數據:SONY A7s +Pentax takuma 300mm F4, ISO400,曝光兩分(使用電子快門線被吃掉1秒),拍了 10 張,暗場 4 張,色差很嚴重。Pentax takuma 300mm F4 只好拿來當成導星鏡用。
2018.09.17
操作過程的影片(時間預先改成 09/14 晚上來模擬)
這幾天好好地研究了 AstroTortilla 英文手冊、相關文件及 iOptron Cem-25P 英文手冊,總算找出了前幾天觀測錯誤的所在:
- 零位沒設好:因為相機鏡頭的光軸與極軸望遠鏡差太多了,超過 6 度以上。怪不得赤道儀做了一星校正後,GOTO 到目標星不會落入視野內。連帶尋星鏡當然也會偏差。問題出在夾住鏡頭的三點導星環需要重新調整,不是把相機鎖上赤道儀的鳩尾座就可以了,還需要仔細調校。

也就是說在未來的觀測 SOP 要加入這一項:重錘桿指向地面後再裝上相機,然後調整赤道儀的方位、仰角螺桿,讓北極星(或遠處燈光)位在極望的圖樣中心位置,同時調整鳩尾座與三點導星環,讓北極星(或遠處燈光)也落入相機的視野中心,這樣才是極望與主鏡的光軸平行。 - AstroTortilla 無法解析成功的原因就是上述原因造成的,由於偏差太大,相機拍下送進AstroTortilla 解析的影像,可能由於偏差太大,目標星(Hip3881)已超出設定的解析範圍(原為10.3° x 6.80°),因此才無法解析成功。

在研究了手冊後,更改較大的範圍(20.6° x 3.4°)

然後使用模擬赤道儀,以之前拍攝的影像來解析,終於解析成功,如圖,只花了 48 秒,算出了偏差有6.39度 (紅圈),程式還更貼心地算出下次把範圍縮小到如藍圈所示的範圍來解析,可以更快。也試著以此範圍重新解析過,只花了 44 秒,比之前少了 4 秒。

(註:其實只要這個搞定了,就算零位沒設好也無所謂,還是可以精準定位。) - 導星鏡使用照明十字目鏡與導星CCD 的焦點設定問題,找出了可以先用目鏡調好焦點,在粗調鏡筒做上記號(可以使用小標簽紙),然後換成導星 CCD ,將粗調鏡筒拉到底是焦點位置。在更換時,可能還會有些微誤差,這可以很方便地使用微調來對準焦點。

使用模擬赤道儀也算是這次研究的額外收穫,可以先在筆電模擬發覺問題並嚐試把問題解決,不用每次大費周張把器材搬上頂樓。
等個好天氣就可以驗證這些的研究是否正確?
2018.09.14
昨晚,好不容易等到的無雲好天氣,卻是空氣品質不良。唉!住在台中市,只好認命。
雖空氣品質差影響視相,但無雲才更重要,因此九點多就把器材搬上頂樓,到凌晨約兩點才不得不收工下樓。因為是首次把學到的技術實戰練習,其間碰到的問題不少,趁記憶猶新趕快寫下來,後續再來檢討慢慢改進,至於拍得的影像是否可用並不重要,這次訴求的只是練習而已。
- 赤道儀、導星鏡、相機及與筆電的連接線安裝好後,先設定零位。
- 使用電子極軸鏡校正極軸:連接筆電,開啟應用程式,啟用蒙氣差校正(要輸入經、緯度、溫度、氣壓,忘了事先查好,只能輸入約略值,這是第一個未來觀測時要記得的事。在 App Store 找到一支免費的「國家天氣」開啟後就有所需要的資訊。)。程式提供了樣版對照(北極星與旁邊幾顆星的相對位置)的功能,所以不怕會找錯北極星。先粗調,最後精調時,由於視相太差,目標無法正確鎖定,不過能調到這樣應該算是不錯了。拔掉電子極軸鏡與筆電的連接線。
- 以赤道儀手柄,執行「一星校正」,選擇織女星(Vega),並開啟 QHYCCD 導星 CCD 應用程式。由於導星鏡與 QHYCCD 導星 CCD 的配合還未實際應用過,第一個步驟當然就是對焦,然後將織女星導入視野中心,再按下赤道儀手柄的「Enter」鍵,以完成一星校正程序。
(註:透過導星 CCD與筆電的連接,在螢幕上看到的星星亮度幾乎差不多,有點難區分到底那顆才是織女星,勉強找到一顆比較亮的,就把它當成織女星了。之前使用尋星鏡,目視校正時很容易就可判別,下次觀測時可以先用 Celestron MAK C90 附的小尋星鏡先定好目標後,再換成導星鏡,然後再進一步微調到視野中心(另一種方式是換上有照明十字線的 12.5 mm 目鏡,但事前要先做好目鏡與導星 CCD 的焦點調成一致,更換時才不用重新對焦)。觀測前也需要先把導星鏡與主鏡的光軸對好,這樣才可以更進一步,把校正目標星微調到主鏡的視野中心,最後才按下赤道儀手柄的「Enter」鍵。
順便開啟 BackyardNikon 以 5X 放大並以魚骨板來把主鏡的焦點對好。練習的結果發覺魚骨板對焦並不好用,以 BackyardNikon 裡的 FWHM 來對即可,儘量把數值調到最低(由於視相及大氣擾動,數值會跳動,在最低的數值的跳動比較穩定時,大概就是正確的對焦點)。 - 這次拍攝的目標為 M31 Andromeda Galaxy 仙女座大星系,透過 Stellarium 找出以 Sigma 70-200mm @200mm 拍攝時的構圖,決定以 HIP 3881 為構圖中心(如圖),再以 Astro Tortill 將其導入到構圖中心,就可開始拍攝。這是本次練習的重心所在,可惜以失敗收場。

先以 StellariumScope 連接 Stellarium 使 Stellarium 可以控制赤道儀,然後在 Stellarium 裡搜尋 HIP 3881 並 GOTO 過去。一定會有不小程度的誤差,所以才需要 Astro Tortill 來做 Plate Solving 精準地導入 HIP 3881 到主鏡視野中心。其間設定曝光 5、 10、 15、 20、 30 秒都無法解析成功,只得放棄。猜想或許與視相不佳有關,也可能是設定Astro Tortill 的參數還要調整,這個就需要再深入研究了。反正極軸對得也夠準了,也作了一星校正, Sigma 70-200mm @200mm 的視野也還算廣,在 Stellarium 裡 GOTO 到 HIP 3881 誤差應不算太大才對,所以接下來就先開啟 PHD 2 ,預備開始拍攝了。 - 開啟 PHD2 ,連接好赤道儀與導星 CCD Camera (前面步驟已對好焦)。由於使用了電子極軸鏡,極軸已對得夠準,不用再做那費時的漂移法,Calibration 後隨即開始導星,然後切換到 BackyardNikon 準備開始拍攝。
- 拍攝重頭戲開始,開啟 BackyardNikon 並設定好拍攝計畫:45秒 30張、1分鐘 30 張、1分半鐘 20 張、2分鐘 15 張、2分半鐘 12 張,讓 PHD2 的導星先 Run 一陣子,等廣告燈熄(11:40) 才開始拍攝,先拍攝曝光時間較短(因為光害這時較嚴重),之後才拍攝較長曝光時間。
才一開始馬上就碰到問題,雖設了拍攝計畫,但只要拍了一張就 About 跳出停止拍攝。嚐試在拍攝每張影像間加了一些暫停的時間,讓電腦有時間存檔,還是一樣,測試了多次,仍是一樣。原先的設定是拍攝時相機與電腦同時都會存檔,改成只存電腦,結果拍攝兩三張後還是會跳出。猜想會不會是使用假電池的關係。再度下樓拿了 Nikon 原廠電池,這時筆電的電量也剩不到 60%,順便也拿了充電線。換下假電池並將筆電接上汽車行動電源充電。初時也一樣是拍攝了一張就跳出來,幾次後就正常了,開始執行拍攝 30 張 45 秒的拍攝計畫,等拍攝六、七張確定沒問題後,下樓倒了杯威士忌拿上頂樓慢慢等。
45 秒的拍攝計畫完成後,BackyardNikon 自動執行60 秒的拍攝計畫,預計所有拍攝計畫都完成時大概要到凌晨四點左右。
1 分鐘的影像拍了幾張後切換到 PHD2 看看導星的狀況如何?一看才知已停止導星,程式告知在赤經方向位移量不足,試著修改參數幾次後還是不行,只好停止導星。(事後研判應是平衡沒做好,拍攝時 M31 幾乎在最高仰角處,相機在下,重錘朝上,這時才體會到 iOptron Cem25P 對平衡的要求很敏感。這次練習稍為偷點懶,只用目視憑感覺來調平衡,果然不行,還是得乖乖地把 iPhone 拿出來使用 app 來定水平調平衡。)沒有導星下,只得停止拍攝計畫,1 分鐘的影像只拍了數張,在 BackyardNikon 裡以 1:1 預視,沒拖線,星點也很細,這應該是極軸對得夠準,加上 Sigma 70-200mm @200mm 的焦長不算太長,曝光 1 分鐘也不算長的關係吧! - 收工:這時也差不多快凌晨兩點,一邊收拾器材一邊讓 BackyardNikon 拍攝 15 張 45 秒的暗場影像,拍完剛好也收得不多了。五格滿電的汽車行動電源還剩兩格半,未來應付整晚的拍攝需求應該足夠了。
- 器材都搬回家裡後,趁著相機主鏡的焦點還沒變動,把幻燈片看片箱拿出來拍攝平場影像,這才算結束了這次的練習。
- 45 秒及 1 分鐘的影像有五十幾張,加上 15 張暗場與 19 張平場,這些預備送進 DSS 裡疊圖,看看是否拍到 M31 Andromeda Galaxy 仙女座大星系?影像處理後是否能讓其現身?
2018.09.11
天氣不好,只好研究影像處理。
使用年初 02.27 在卓蘭以 Kenko 攝星儀拍的 M45 昴宿星團,新學的影像處理方法,稍為把藍色雲氣拉了一點出來,而七姊妹的星芒也更明顯,更容易認出來。但是......也顯示了相機的 CMOS 該清一清了。

拍攝數據:SONY A7s +Pentax takuma 300mm F4, ISO 200,曝光兩分半(使用電子快門線被吃掉兩秒),拍了 23 張,疊圖時選了最佳的15張,暗場 12 張,DSS 疊圖的設定如下圖:

2018.09.08
該做的測試大致都測過了,沒有甚麼問題。 現在只能把所有器材裝箱,等天氣變好。
最後的一個測試是 Astro Tortilla 與 BackyardNikon 的協同處理,先使用 StellariumScope 與 Stellarium ,在Stellarium 裡找尋目標並驅動赤道儀將望遠鏡 GOTO 到目標,切換到 Astro Tortilla 的桌面,可以看到Stellarium 傳過來目標(Target)與赤道儀傳過來的值(Current)RA 與 Dec 略有差別(白天測試,目標只能是太陽的關係),這些差別就是 Astro Tortilla 要來修正的。

按下 「Capture and Solve」隨即驅動 BackyardNikon 拍下一張曝光 10 秒的影像,存檔後 Astro Tortilla 便會讀出並與星圖資料比對,找出符合的星圖來與這張影像比對,Solve 的結果當然是失敗的,因為在室內測試,鏡頭蓋沒拿下。但至少了解了 Astro Tortilla 的處理過程。
習慣使用不同的桌面給不同的程式,因此使用了五個虛擬桌面,但 Windows10 無法像 Mac OS X 不同桌面有不同的背景,只有一種,每個桌面都一樣,這實在不方便,於是找到一支程式可以讓 Windows10 每個虛擬桌面有不同的背景,這樣就好看多了,而且使用 Miracast 遠端遙控時使用快捷鍵切換也沒問題。

2018.09.07
這次重灌 Windows10 後,決定再增加一個設定非常複雜,但是非常好用的軟體,花了一個晚上來安裝及設定。 它需要下載非常龐大的星圖資料,這是做為比對用的。
通常深空星體不只肉眼無法看到,甚至透過望遠鏡也看不到,往往需要長時間曝光才能讓它們現形。所以如何將望遠鏡對準目標在以往就是一個非常複雜且費時的過程。需要把目標周圍的亮星認識清楚,利用這些亮星當作參考,慢慢將望遠鏡指向目標。 就算最新的赤道儀有 GOTO (自動導入)功能,看看行星還可以,若要進行深空星體的拍攝,精度還差太遠,因此才需要這個軟體。
今晚安裝叫做 AstroTortilla 的軟體就是提供這樣的功能,安裝時下載了約6、7G 的星圖比對資料,然後是複雜的設定。(參考這篇文章)
首先要把望遠鏡與相機配合後的視野(FOV)算出來,大概就花了一兩小時才弄出來。
再依據這些算出來的視野進行軟體的設定。
使用時先用赤道儀 GOTO 到預定拍攝的目標(一定會有不小的誤差),接下來啟動 AstroTortilla 軟體,它會驅動相機先拍張照片,根據拍攝器材的視野資料找尋龐大資料庫裡符合的星圖資料然後進行比對。比對後就可以知道目前望遠鏡的指向與預定的目標偏差了多少,接下來 AstroTortilla 軟體就會驅動赤道儀逐漸修正偏差,最後把望遠鏡指向目標,誤差在 1'(角分)內,可以更小,但要花更長的時間處理,手上現有的器材,這樣的精度足夠了。 然後就可以開始長時間曝光的天文攝影。
這樣的技術叫做「Plate Solving」。
(註:之前除了獵戶座星雲因為雙筒望遠即可看到,因此能夠拍攝下來,其他的沒有一次成功,因為看不到,亂搶打鳥也沒用。)
2018.09.05 主題:躲在車內遠端遙控 Windows 10 的 Miracast
影片示範說明應該是最清楚不過:前方筆電未來就是放在溫暖的車內遙控,距離控制赤道儀的 Lenovo ideapad 120S 20 公尺以內操控起來都還可以順暢。
2018.09.05 主題:躲在車內遠端遙控 Windows 10 的 Miracast
在台灣,今年八月多雨,九月看看也差不多,恐怕得等天氣變冷後才會較有機會拍照。
開始玩天文攝影剛好是年初,一台 Kenko 攝星儀,在冬天的社區頂樓就能拍到還看得過去的照片,但是冬天在頂樓的寒風徹骨下,每次都要「全副武裝」。今年要有希望拍到好照片,大概得等到至少十月下旬後上清境或合歡山了,屆時山上 10 度以下的低溫應該是很平常的。想想,要在這樣的戶外拍攝個幾小時,還沒去幾乎就要打退堂鼓了。
直到把這支影片看了數遍,終於讓我看出了一些名堂:
躲在車內遠端遙控
是的,開著暖氣的車內,以另一台筆電遠端遙控連接赤道儀、CCD Camera、Nikon D610。當然,還是得先花個半小時至多一小時站在寒風中把赤道儀架設好、極軸校正(電子極軸鏡大概五分鐘內可以有很精準的結果)、對焦(魚骨板),這些是無法在車內做的步驟(電動對焦可在電腦操作,但要花不少錢),其他的都可以在車內以遠端遙控搞定。
所以去借了一台舊HP (Core i5-3317u RAM 8 G)筆電來搭配控制赤道儀的 Lenovo ideapad 120S。
想要遠端遙控,第一個想到的就是 StarFi 無線適配器無法使用了(也曾想過 Virture WI-FI ,在一台筆電裡建立兩個 WI-FI 連線,Google 了一下,太複雜就打消這個念頭),但 Lenovo ideapad 120S 只有兩個 USB 及一個 Type C,連接 CCD Camera、Nikon D610 就用掉兩個 USB,不想買 USB HUB,因此再買了「USB 3.1 Type-C(公) 轉USB 3.0(母) OTG鋁合金轉接頭」使連接赤道儀的 RS232+RS232-USB 與電腦也能經由 Type C 接上。
開始測試,首先想到的就是利用 VNC 或 Teamviewer 來遠端遙控(Windows 10 家用版是把遠端桌面拿掉的),在區網下沒問題,甚至以手機開熱點兩台筆電連上後也可以。只是手機熱點的訊號不能太遠,而且自己手機的流量只有 1.2 G,怕會不夠用,大概需要解約換成吃到飽的方案(到山區,可能得換成中華電)。
考慮到如果赤道儀與車子有點距離(超過 10 公尺),那不是得把手機擺在兩者中間,好像不太好。於是再請出 Google,找到這篇文章,讓主控端與手機熱點連接(在車內),然後讓被控端(連接赤道儀)的筆電連到車內的筆電,因為兩者的無線互連是筆電,訊號較強,大概 15-20 公尺都沒問題,當作備案。
幾乎就是這樣定下來的方法,在去小學走走操場時順便想了一下,回家後叫出 Google 下了幾個關鍵字:「windows 10 點對點 連接電腦」,找到這篇文章,測試了幾下才弄出來一個最佳方案:Windows 10 桌上型電腦的 Miracast。
被文章內這段話:「而如果投影端也是 Windows 10 的話,接收端甚至可以像是在使用遠端桌面一樣、操作另一台電腦~」吸引,然後也真弄出來了---不用手機熱點,不用去換成吃到飽。利用兩台筆電的無線網卡直接互連,一台為主控端(車內的筆電,相當於投影的螢幕),一台是被控端(連接赤道儀的筆電,螢幕投射到另一台筆電,之後可以把筆電的螢幕亮度調到最低來省電,在主控端的螢幕並不會變暗),測試的結果兩台筆電距離 20公尺左右還不太會有問題(Lag)。了解了,其實很簡單:
- 從主控端(車內的筆電,相當於投影的螢幕 hanHP)的開始,選取「連線」,執行後可以是一個視窗或是全螢幕。
 |
 |
 |
|
- 在被控端(連接赤道儀的筆電 Lenovo ideapad 120S,螢幕投射到另一台筆電就是 hanHP)上,按住鍵盤上的 Windows 鍵、再按「P」,螢幕右側就會出現「投影」的選單,然後點選「連線到無線顯示器」

- 在連線範圍內就會出現 hanHP 顯示器

- 點選「 hanHP 顯示器」的畫面,黃圈內的選項一定要打勾,主控端筆電才能操控這台筆電。

現在主控端的筆電可以遠端遙控連接赤道儀的 Lenovo ideapad 120S,為了看清楚,故意把連線畫面設為視窗,實際操作時還是全螢幕較佳,彷彿直接操作連接赤道儀的 Lenovo ideapad 120S般。

2018.09.04
晚上(十一點半過後,等大樓旁的大型廣告熄燈)若天空狀況許可,準備試試以 Nikon D610(內置光害濾鏡)+Sigma 70-200 mm F2.8 來拍攝 M31 仙女座大星系。導星鏡這次用 200 mm 的。
會先以電子極軸鏡來精準校正極軸(節省時間),然後嚐試先以 135mm 焦段拍攝(視野較廣,才能把M31 仙女座大星系拍攝下來),再以 200mm 焦段拍攝一次。拍攝時溫度要記錄下來。
至於暗場與平場,找時間再來拍攝,溫度要與拍攝M31 仙女座大星系時相同。
重覆以上步驟,但使用 BackyardNikon 以 Dither 的方式拍攝。(好像這種方式可以不用拍攝暗場及平場,如以下的影片所說,等影像能夠拍攝下來再來測試)
今晚若不行,明天再看看,不行就大後天,直到筆電借出前,總有一天可以拍攝下來。
出借筆電的這一星期,預備把拍攝下來的影像利用 IRIS 這套好像是個法國人寫的軟體來處理。聽說難度很高,手冊看了一半,發現它有 Script 的功能,這意味著若能熟練,可以把拍攝的影像找出固定的 SOP 並寫成 Script ,未來只要拍好影像,丟進 IRIS 以寫好的 Script 處理,然後去泡個咖啡,過一陣子就可以得到漂亮的照片。
這很有挑戰性,值得花一個星期來深入研究。
今晚的器材已打包好,隨時可以上頂樓拍攝,如圖。

昨晚手機隨手拍,太暗,對焦很難對準。

2018.09.03
連續下了半個多月的雨,總算這幾天放晴了。
昨晚就啟用了會爬樓梯的手推車把有份量的赤道儀拿上頂樓測試看不到北極星時的極軸校正(不帶筆電)。弄了三個多小時,沒有成果,只好收工。
除了沒有成果,上樓梯時姿勢不對還閃了腰,靠著貼サロンバス 及熱敷就好了許多,於是今晚重新再上頂樓,拉手推車時側著身子,就不會有問題了。
同樣也是沒有帶筆電。
由於昨晚的練習失敗,重新把赤道儀的手冊仔細看了幾遍,找出發生錯誤的所在,今晚的練習很快就把極軸對好(沒有看到北極星),然後做一星校正及三星校正。
以赤道儀的手柄操作 GOTO ,尋找木星,按鈕一按,望遠鏡自動指向木星。雖然做了三星校正還是有點小誤差,但至少木星會在尋星鏡的視野裡,再用手柄調一調就到視野中心了。
GOTO 了織女星、大角星、土星、奎宿九,也 GOTO 到仙女座大星系,只是視相不佳,望遠鏡光圈太小,肉眼看不到。
玩了一陣,再把 StarFi 無線適配器裝上,用手機來遙控 GOTO,好玩,不過精確度還是不夠好。
雖然 GOTO 的精確度勉強可以接受(畢竟是看不到北極星的極軸校正),把目標星再以手柄導入視野中心後(C90 焦距 1250 mm 目鏡為有十字線照明 12.5 mm ,相當於 100 倍),以赤道儀自動追踪,發現幾分鐘後目標星還是會慢慢跑出十字線中心,這意味著赤道儀的追踪精度還是不夠。
七點上頂樓,這時才九點多(快十點了),想說還早,天空狀態也還不錯,決定下樓把筆電拿上來練習 Auto Guiding 自動導星。
為了方便裝在 C90 上,所以帶上來的是 mini 導星鏡,焦距 120mm ,導星 CCD 是 ZWO 的。 把導星鏡先對好焦點,然後啟動 PHD 2 開始 AutoGuiding 。
有了筆電的導星,目標星為奎宿九,導入十字線的中心,大概要五分鐘後奎宿九才會稍離開十字線中心。會有這樣的結果應該是導星的精度不夠,也就是說 C90 有 1250 mm ,而導星鏡的焦距卻只有 120 mm,應該至少要主鏡焦距的一半,也就是 600mm 才夠。或許不用那麼長,明晚若天氣還不錯,導星鏡換成 200mm 的來試試看。
再度 GOTO 到火星,並將火星導入十字線中心並啟動導星,經歷十分鐘,火星幾乎停在十字線中心不動, AutoGuiding 的精度實在不錯,那不是之前只有單馬達的 Kenko 攝星儀可以相比,如下圖,使用攝星儀時,Y 軸都只能用最大的 16 PX,大多的情況甚至還會跑出圖形外。現在 Y 軸只用到 4 PX(像素),可以看到紅線與藍線的起伏大約在兩個 PX 之間。

到此,開始有點後悔下星期要把筆電借給朋友一星期(朋友開口借時的那段時日天天下雨,想說應該用不到就一口答應了),沒想到最近幾天放晴了,只好趁這幾天把該練習的部分安排一下再上頂樓。
晚上十一點二十分,今晚練習夠了,花了二十分鐘收好所有器材,收工下樓。
下星期---經過今晚的練習,沒有筆電,就算天空無雲,大概也很難有興致上頂樓了。吃過大菜,小吃暫時沒興趣了。
2018.09.02
不帶筆電的操作:
- 確保三腳架處於水平狀態
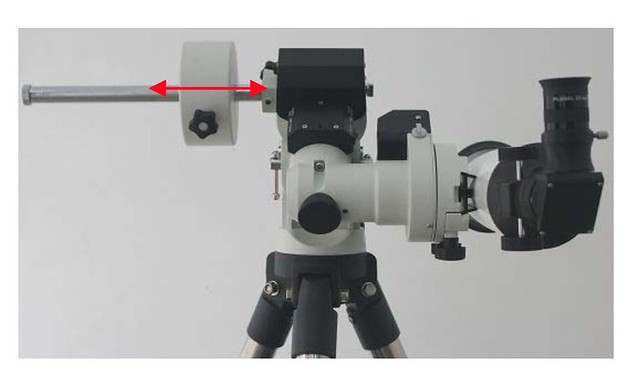
- 設定零位( Zero Position):重錘桿指向地面,望遠鏡前端在最高的位置( i.e. with the CW Shaft pointing to the ground and the telescope front side at its highest position)
- 確定尋星鏡與主鏡光軸一致
- 望遠鏡的平衡
- 調整主鏡的光軸與極軸一致
- 看到北極星的情形,使用極軸望遠鏡進行快速極軸校準。視需要可用「雙星校正」進一步優化極軸校正。
(赤道儀在所有校正啓動前必須處於零位) - 看不到北極星,需要使用「Polar Iterate Align 極軸校準程序」,利用兩顆亮星來校準
- MENU => “Alignment” => “Polar Iterate Align” 第一顆星要手動選擇靠近子午線可以看到的亮星 A星(仰角高的星較佳),第二顆要選擇靠近地平附近可以看到的亮星 B 星
- 使用 StarFi 配合 SkySafari (使用 iPhone SE 或 iPad Pro)來 GOTO
註:按照 SkySafari 的手冊說明 synchronizes the scope(針對的是Celestron Wi-Fi scope type,不要使用手柄做一星或三星校正,免得手柄的校正與 SkySafari 的"local sync" 衝突。不曉得 StarFi 是否也是如此?根據 iOptron Cem25P 手冊:If you are control the mount using a planetarium software via ASCOM, and the software has its own alignment function, please clear the alignment data.) 步驟如下:- 利用手柄的「自動尋星」將望遠鏡指向一顆亮星,然後在 SkySafari 裡的望遠鏡控制面板將這顆星移到目鏡視野中心。
- 在 SkySafari 星圖裡點選這顆星的名字使成為目標星(或用「尋找」的方式也可以)
- 點選「Align」按鈕(這樣就可以讓 SkySafari 完成 "local sync" :stores the offset between the telescope's reported position and the selected object's position。如果讓 SkySafari 再 GOTO 到差別較大的天區,上述步驟還要重做)
- 單純使用手柄來操控:直接做一星或三星校正
- 操作手柄,花十分鐘記錄 PEC並 Play Back。
- GOTO 到目標星並開始拍攝(只能使用電子快門線來控制相機拍攝)
- 重點整理:
- 1星校准/同步到目標星,可以校准零位誤差。
- 2星校准/極軸校准,可以校准極軸誤差。
- 3星校准,可以校准錐度誤差和其他誤差。
這樣的方式,單張曝光時間不可能太長,大概比較適合市區光害嚴重的頂樓拍攝,去山上,筆電非得帶著,才能進行進階(AutoGuiding、Dither、Plate Solving .......)的天文攝影。
2018.09.01
(修正版)艾頓 iOptron CEM25-P 中文 GoTo 赤道儀 (參考原廠中、英文手冊)
- 組裝前的第一個動作:更換短的緯度調節旋鈕才能符合台灣的緯度

- 先將赤經軸及赤緯軸的離合器調至 OPEN 位置

- 裝上重錘桿及重錘(安裝重錘時先確認重錘桿指向地面)

- 組裝完後將重錘桿指向地面,再將赤經軸及赤緯軸的離合器調至 Close 位置並將離合器鎖定螺絲大致鎖緊。
觀星或拍攝前的預備動作:
- 確保三腳架處於水平狀態:將 iPhone 放在三腳架上,以 Polar Scope Align Pro 來確認水平狀態(或以赤道儀上的水平泡泡來確認)。

- 設定零位( Zero Position):手冊寫得很含糊,直到找到這支影片,才了解如何設定零位(先前網路是找到不少說明,但都不適用,因為iOptron CEM25-P沒有赤緯、赤經刻度環)。
- 先將赤道儀轉到重錘桿指向地面:將iPhone 放到重錘上,開啟 Goionmeter 來確認水平。也可以開啟赤道儀的電源以手柄左右的方向鍵來調整直到 Goionmeter 顯示為 0 度,然後做記號,這樣以後只要對齊記號即可。


- 先把鳩尾座鬆掉(鳩尾座寬度無法容納 iPhone SE),將iPhone 放到鳩尾座上,開啟 Goionmeter ,並開啟赤道儀的電源以手柄上下的方向鍵調整直到 Goionmeter 顯示為 0 度來確認水平,一手扶著 iPhone 以手柄上下的方向鍵調整直到 Goionmeter 顯示為 90 度,做上記號。





- 現在赤道儀已設定好零位,以手柄按 /Menu/望遠鏡零位/設置零位 將此位置設為零位。未來赤道儀換過地點重新架設,只要將這兩個記號對齊後就是零位。
- 先將赤道儀轉到重錘桿指向地面:將iPhone 放到重錘上,開啟 Goionmeter 來確認水平。也可以開啟赤道儀的電源以手柄左右的方向鍵來調整直到 Goionmeter 顯示為 0 度,然後做記號,這樣以後只要對齊記號即可。
現在可以把望遠鏡裝上赤道儀
- 先確定尋星鏡與主鏡光軸一致
找一個遠處目標或亮星,以有十字線目鏡來確認。
- 望遠鏡的平衡:
若是要天文攝影,在平衡之前先將望遠鏡指向所要拍攝的方向。- 開始平衡前也是需要赤經軸及赤緯軸的離合器調至 OPEN 位置
- 赤經軸的平衡:
- 面對北方(或是與極軸望遠鏡的方向一致),旋轉鏡筒至右邊(東),重錘在左邊(西),讓重錘桿大致水平。(此時鏡筒不見得是水平狀態)
- 右手扶著鏡筒,左手將開啟 Goionmeter 的 iPhone 輕放到重錘桿上,慢慢調整至完全水平,然後拿開 iPhone,稍為放開右手,觀察鏡筒與重錘的旋轉方向,調整重錘的位置並重覆同樣的動作,直到放雙手後鏡筒與重錘不再旋轉,這樣就達到赤經軸的平衡。(此時也可把赤經軸的離合器調至 Close 位置,方便接下來的赤緯軸的平衡。)

- 赤緯軸的平衡:
- 維持鏡筒在右邊(東),重錘在左邊(西),調整鏡筒大致成水平。
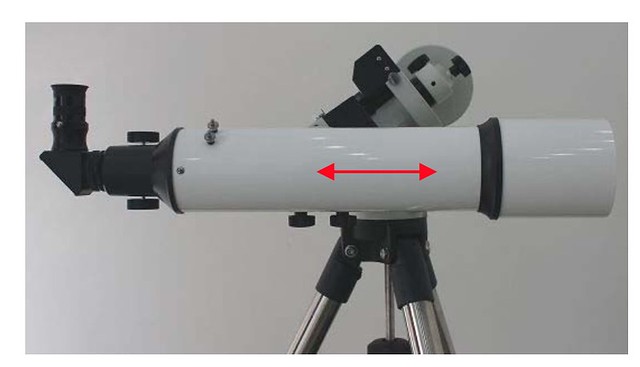
- 右手扶著鏡筒,左手將開啟 Goionmeter 的 iPhone 輕放到鏡筒上,慢慢調整至完全水平,然後拿開 iPhone,稍為放開右手,觀察鏡筒的旋轉方向,鬆掉鎖住鏡筒鳩尾座的螺絲,前後移動鏡筒的位置並重覆同樣的動作,直到放雙手後鏡筒水平狀態下不再旋轉,鎖緊鏡筒鳩尾座的螺絲,這樣就達到赤緯軸的平衡。如果之前把赤經軸的離合器調至 Close 位置,現在將其再調至 Open 位置,確認整個裝置都達成平衡不再旋轉。

- 將赤道儀轉到零位:以手柄按 /Menu/望遠鏡零位/望遠鏡歸零,回到之前設定的零位。
- 調整主鏡的光軸與極軸一致
極軸望遠鏡對準北極星(任一亮星或遠處的明顯目標,因為下一步驟就是極軸校正,以北極星為目標比較方便),將北極星調至 Rectile 中心十字交點處,然後再主鏡上使用有十字線的目鏡(12.5mm 或 20mm),此時北極星應該在十字線中心交點處。如果不是,只用手柄上下鍵調整主鏡讓北極星落在十字線中心交點處,然後再以手柄 /Menu/望遠鏡零位/設置零位。如果無法一致,可能就要考慮主鏡下墊個墊片,避免 Cone Error 的產生。或者使用三星校正後,系統會自動修正這些錯誤。
接下來可以進行極軸校正
極軸望遠鏡進行快速極軸校準:
- 稍為鬆開三腳架底座下中心的上旋鈕

- 才能調整赤道儀兩側的方位調整鈕。

- 稍為鬆開三腳架底座兩側的緯度固定螺桿,才能以緯度調節鈕調整赤道儀的高度(極軸的俯仰角度)

- 直到北極星的位置符合 Polar Scope Align Pro 計算的北極星位置

如果只是目視觀看行星,只要將各連接線及手柄接好,接上行動電源,做一次一星校正即可進行觀測或攝影;若要很精確的校正(五分鐘以上的長時間曝光),三星校正就是必須的。
快速精準校正極軸:電子極軸鏡(需要帶筆電)
當然得在看得到北極星的情形下才能,極軸校好後再做個一星校正即可。
(註:iOptron Cem25-P 已經沒有回差(Backlash)的問題)
看不到北極星的極軸校正:
- 先以 Polar Scope Align Pro 的 Daytime/No Polarscope Alignment 模式大致粗調,這樣下一步驟才會比較輕鬆。
- 按照 Polar Scope Align Pro 作者所說,先將一塊長木板固定在赤道儀的鳩尾座上,再將 iPhone 固定在長木板上(主要是在測量時儘量遠離赤道儀,讓干擾減少)。

- 在Daytime/No Polarscope Alignment 模式下調整赤道儀兩側的方位調整鈕與緯度調節鈕將畫面中的十字移到中心點且左右上下四個端點沒有出箭頭。

畢竟這樣的測量是基於 iPhone 本身 Sensor 的精度及所受到外在的干擾,還是會有一定程度的誤差,因此還需要使用赤道儀提供的「極軸校準程序」,利用兩顆亮星來校準,先從尋星鏡粗調,再在主鏡微調。校準過程中會需要高倍有照明十字線的目鏡。(註:淘寶買了一只 Clelestron 12.5 mm 照明十字線目鏡就是為此而備)
2018.08.31
到山上天文攝影,常會發現器材上結了層露水,這會影響拍攝。
結露的原因與夜間的低溫及溼度有關。溫度越高的空氣能涵養的水氣越多,例如同樣的溼度(假設為 95%),25度C空氣中的水氣就比15度C多。在白天,若溫度為25度C,95%的溼度不會結露,但到了夜間氣溫若降為15度C,同樣水氣含量的空氣就可能會讓相對溼度來到 100%而凝結在器材上(尤其是器材的比熱相對較小,更容易結露。日常看到的花草葉面或停在外面的車子露水易凝結在上面就是這個原因)。
所以解決的方式就如照片所示在主鏡及導星鏡的遮光罩上加上除霧帶,使鏡筒前端溫度略高於外界,才不會在鏡面結露影響拍攝。

除霧帶需有溫控裝置,視望遠鏡的大小及露水嚴重程度來加溫,但在焦距 1000mm 以上的長焦天文攝影時,因加熱而產生的熱對流會影響解析力,不可不注意。
2018.08.29
今天很高興,一個偶然的契機找到這個討論串,然後在 YouTube 找到這支影片,解決了一直無法以 Stellarium 來控制 iOptron Cem25P 的方法,甚至比影片的方式更「清爽」,因為是透過 StarFi 無線連接,完全不需要 RS 232 及 轉 USB 連接線。
之前搞了很久,不管有線或無線連接、各種不同的 Stellarium版本及各種不同的 Stellarium Scope版本都沒成功,直到看了這支影片才知道關鍵的所在,如下圖,之前設錯了,一直糾結在第一個選項。這次選了「外部軟體或遠端電腦」,一試就成功了。
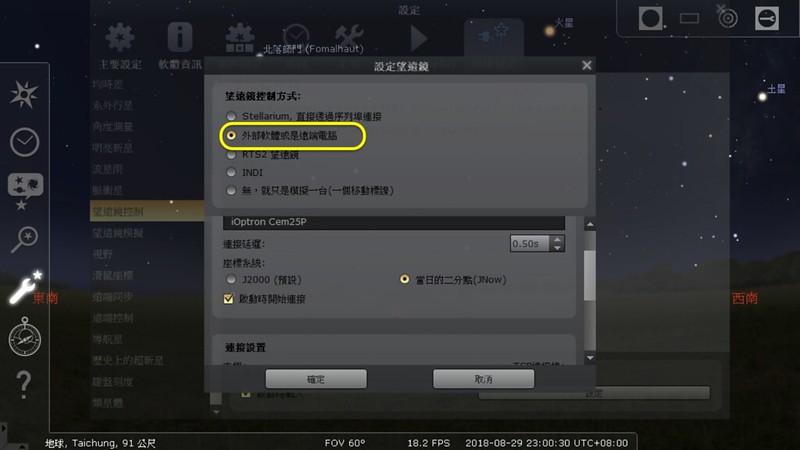
要成功連接,需如影片所說下載ASCOM 及 iOptron Cem25P驅動程式先安裝好,再安裝 Stellarium最新版及Stellarium Scope最新版即可。現在的困擾是這台 LENOVO ideapad 的 Windows 10 不曉得是安裝了什麼程式之後(還是更新?), Stellarium 64位元版無法執行(早些時候是可以的),只能執行Stellarium 32位元版,可能需要重灌 Windows10 ,找個時間再來處理。
未來重灌 Windows10 後,把各驅動動式安裝好(ASCOM 、 iOptron Cem25P及 CCD Camera),再安裝 Stellarium 64位元版、 Stellarium Scope最新版、AstroTortilla、BackyardNIKON、phd2 後,就可以如底下這支影片的步驟達成精準且長時間曝光的天文攝影:
An imaging session - PoleMaster Polar Alignment - Astrotortilla - Backyard for Nikon - NXD-2 - Whats Up - PhD2 - Cartes du Ciel from Ed Overstreet on Vimeo.
器材一切就緒後,啟動 PoleMaster 來精準校正極軸(校正好後 USB 線即可拔除),再連接 StarFi並啟動 iOptron Commander ,三指切換桌面並啟動 Stellarium Scope,然後再啟動Stellarium 來尋星並定位,例如 M31,找到後按 Ctrl+1 即可指揮望遠鏡對準 M31。(這個步驟其實以 iOptron Commander 也可達成,但是在Stellarium 裡來 GOTO 感覺更酷!)
上述的方式無法很精準地定位,所以再三指切換桌面並啟動 BackyardNIKON (需要一條USB 線連接 Nikon D610 與筆電的 USB),然後再用AstroTortilla 以 plate solving 更精準地定位。
三指切換桌面並啟動 PHD2 來導星(需要一條USB 線連接 CCD Camera 與筆電的 USB),再三指切換到 BackyardNIKON 設定 BackyardNIKON 以 Dither 方式與 PHD 2 溝通,然後製定拍攝計畫後就可以開始拍攝了。
2018.08.28
突然想到,可以解決把赤道儀等重量級器材搬上頂樓的方法--當然是要再花錢的。不是很貴,沒必要去淘寶買,加上運費會划不來。PCHOME 與 MOMO 價格相同,但 MOMO 有 250 折價券,所以就在 MOMO 買了。
2018.08.24
網路看到的一段話:「對於業餘天文而言,攝影和目視幾乎是兩個完全不同的愛好。如果你喜歡攝影,那最先進的自動尋星,自動跟踪赤道儀就是你所有裝備的核心。然而攝影更像是做一個小型的物理實驗,你的大部分時間都在校準儀器,分析數據,處理圖像。」
好像真是如此呢!
那就先從「校準儀器」開始吧!
--------------------------------------------------
艾頓 iOptron CEM25-P 中文 GoTo 赤道儀 (參考原廠中、英文手冊)
- 組裝前的第一個動作:更換短的緯度調節旋鈕才能符合台灣的緯度
- 先將赤經軸及赤緯軸的離合器調至 OPEN 位置
- 裝上重錘桿及重錘(安裝重錘時先確認重錘桿指向地面)
- 組裝完後將重錘桿指向地面,再將赤經軸及赤緯軸的離合器調至 Close 位置並將離合器鎖定螺絲大致鎖緊。
觀星前的預備動作:
- 確保三腳架處於水平狀態,以赤道儀上的水平泡泡來確認。
- 先確定尋星鏡與主鏡光軸一致
- 望遠鏡的平衡:
(中文說明書提到:「......德國式赤道儀(GEM)大部分情況下都不處於平衡狀態(緯度越低,不平衡越嚴重), 針對此缺陷 iOptron 公司在全球獨一無二的推出世界首創的全平衡中國式赤道儀(CEM)。相對於德國式赤道儀(GEM)系統的重心在赤經軸的前端,全平衡中國式赤道儀(CEM)將系統的重心處於赤經軸的中部底座的支撐點上。這樣的設計使得赤道儀在任意緯度位置都接近全平衡狀態,即使在裝有望遠鏡和平衡錘滿載的情況下高度方位調節也非常輕鬆,同時由於重心下移,赤道儀體積減小,鋼性增加,本體重量下降,便攜性更好。由於全平衡中國式赤道儀(CEM)的特殊結構即使在低緯度甚至赤道區域不需要任何附件原配三腳架也能正常使用。」)
因此整體系統的平衡非常重要
- 若是要天文攝影,在平衡之前先將望遠鏡指向所要拍攝的方向。
- 開始平衡前也是需要赤經軸及赤緯軸的離合器調至 OPEN 位置
- 赤經軸的平衡:
- 面對北方(或是與極軸望遠鏡的方向一致),旋轉鏡筒至右邊(東),重錘在左邊(西),讓重錘桿大致水平。(此時鏡筒不見得是水平狀態)
- 右手扶著鏡筒,左手將開啟 Goionmeter 的 iPhone 輕放到重錘桿上,慢慢調整至完全水平,然後拿開 iPhone,稍為放開右手,觀察鏡筒與重錘的旋轉方向,調整重錘的位置並重覆同樣的動作,直到放雙手後鏡筒與重錘不再旋轉,這樣就達到赤經軸的平衡。(此時也可把赤經軸的離合器調至 Close 位置,方便接下來的赤緯軸的平衡。)
- 赤緯軸的平衡:
- 維持鏡筒在右邊(東),重錘在左邊(西),調整鏡筒大致成水平。
- 右手扶著鏡筒,左手將開啟 Goionmeter 的 iPhone 輕放到鏡筒上,慢慢調整至完全水平,然後拿開 iPhone,稍為放開右手,觀察鏡筒的旋轉方向,鬆掉鎖住鏡筒鳩尾座的螺絲,前後移動鏡筒的位置並重覆同樣的動作,直到放雙手後鏡筒水平狀態下不再旋轉,鎖緊鏡筒鳩尾座的螺絲,這樣就達到赤緯軸的平衡。如果之前把赤經軸的離合器調至 Close 位置,現在將其再調至 Open 位置,確認整個裝置都達成平衡不再旋轉。
- 然後將赤道儀轉到零位(重錘桿指向地面:將iPhone 放到重錘上,開啟 Goionmeter 來確認水平。也可以開啟赤道儀的電源以手柄左右的方向鍵來調整直到 Goionmeter 影示為 0 度)。

- 接下來就可以把赤經軸及赤緯軸的離合器調至 Close 位置,並將離合器鎖定螺絲大致鎖緊。(離合器鎖定螺絲若鎖得太緊,鏡筒旋轉時可能會摩擦聲發出,這時就要再調鬆一些。)
- 調整主鏡的光軸與極軸一致
極軸望遠鏡對準北極星(或任一亮星或遠處的明顯目標,因為下一步驟就是極軸校正,以北極星為目標比較方便),將北極星調至 Rectile 中心十字交點處,使用有十字線的目鏡(12.5mm 或 20mm),以手柄上下鍵調整主鏡讓北極星移到十字線中心交點處。(先從尋星鏡粗調,再在主鏡微調。如果無法一致,可能就要考慮主鏡下墊個墊片,避免 Cone Error 的產生。若使用三星校正,系統會自動修正這些錯誤。如果連接了 StarFi,也可以透過 iOptron Commander 來微調 。)
- 使用手柄,/Menu/望遠鏡零位/設置零位 將此位置設為零位。如果連接了 StarFi,也可以透過 iOptron Commander 來微調 。
接下來可以進行極軸校正。
極軸望遠鏡進行快速極軸校準:
- 稍為鬆開三腳架底座下中心的上旋鈕
- 才能調整赤道儀兩側的方位調整鈕。
- 稍為鬆開三腳架底座兩側的緯度固定螺桿,才能以緯度調節鈕調整赤道儀的高度(極軸的俯仰角度)
- 直到北極星的位置符合 Polar Scope Align Pro 計算的北極星位置
如果只是目視觀看行星,只要將各連接線及手柄接好,接上行動電源,然後開啟赤道儀電源就可以了。
若要快速,至少還是做一次一星校正再來進行觀測或攝影;若要更精確的校正,三星校正就是必須的。
在看得到北極星的情形下,購入的電子極軸鏡,能快速且精準的校正好極軸。之後不用兩星校正那麼麻煩,再做個一星校正即可。
(註:電子極軸鏡說明提到:「單軸赤道儀的福音:像星野赤道儀這類的單軸赤道儀,由於沒有赤緯軸,因此赤緯方向無法進行糾偏。而使用電子極軸鏡,在極軸對準以後,在赤緯方向的漂移量將非常小,可以進一步提高這類赤道儀的性能。」 早買這個東東,搞不好就不用買赤道儀了。 想想,赤道儀還是該買,才能解除重量的束縛,不然別說 Nikon D610 +Sigma 150-600mm 擺不上,就連 13公分的馬卡折反鏡也不能放上像 Kenko Sky memo S 這種星野赤道儀,到時馬達弄壞,就得不償失了。)
iOptron CEM25-P赤道儀能承重 12.3 公斤(不含重錘),Kenko Sky memo S 才 5 公斤(需要含重錘),要導星,根據PHD2 程式的作者所說,要打個五折,Kenko Sky memo S 變成 2.5 公斤,扣掉重錘及調節座後,能擺上的設備只剩 800 克,所以之前才要斤斤計較,因此自製了一個失敗的導星鏡筒。(註:iOptron Cem25-P 已經沒有回差(Backlash)的問題)
有了iOptron Cem25-P 赤道儀,以現有的配備可以大肆揮霍一番,沒有什麼好顧忌,若說有,那是自己的體力了。
看不到北極星的極軸校正:
- 先以 Polar Scope Align Pro 的 Daytime/No Polarscope Alignment 模式大致粗調,這樣下一步驟才會比較輕鬆。
- 按照 Polar Scope Align Pro 作者所說,先將一塊長木板固定在赤道儀的鳩尾座上,再將 iPhone 固定在長木板上(主要是在測量時儘量遠離赤道儀,讓干擾減少)。
- 在Daytime/No Polarscope Alignment 模式下調整赤道儀兩側的方位調整鈕與緯度調節鈕將畫面中的十字移到中心點且左右上下四個端點沒有出箭頭。
畢竟這樣的測量是基於 iPhone 本身 Sensor 的精度及所受到外在的干擾,還是會有一定程度的誤差,因此還需要使用赤道儀提供的「極軸校準程序」,利用兩顆亮星來校準。校準過程中會需要高倍有照明十子線的目鏡。(註:淘寶買了一只 Clelestron 12.5 mm 照明十子線目鏡就是為此而備)
如果只是目視觀看行星,只要將各連接線及手柄接好,接上行動電源,做好上述的平衡及極軸校正,然後開啟赤道儀電源以手柄操作鏡筒的旋轉,設好零位,接下來就可以手柄操作 GOTO 要看的行星。
2018.08.22
拍攝 M31 仙女座大星系的實戰演練:
器材:

- 赤道儀:iOptron CEM25-P 、重錘延長桿、2 Kg 重錘(G)、控制手柄及 Statfi 無線網路Adapter(H)
- 拍攝器材:Nikon D610 + SIGMA 150-600mm F5-6.3 DG OS HSM C版、假電池(C)
- 導星 CCD 及 導星鏡(D):QHY5L-II-M黑白高靈敏度導星CCD 、Pentax Takuma 300mm F4 + M42鏡頭轉1.25英吋望遠鏡口轉接環
- 控制筆電(A):Lenovo IdeaPad 120S 11吋(4G/64G USBX2):(A1)(D))
- 電源:【飛樂 Discover】 汽柴油兩用 15000 mAh 救車行動電源(B)
- 其他配件:魚骨對焦板(F)、除霧帶(E)
- 連接線大集合:

操作:
- 因為不想使用 iOptron CEM25-P 內附的 4.7 Kg 重錘,所以改用重錘延長桿加長力臂後,只要使用 2 Kg 重錘即可平衡。
- 使用 Nikon 假電池後,對於拍攝一整晚的相機電力需求就不怕拍攝會因換電池而中斷(接行動電源 5V 2A)。
 |
 |
- 拍攝 M31 前,先以奎宿九為目標,使用魚骨對焦板把焦點對準,然後把「多功能星野攝影支架」上的三點環螺絲稍為上緊即可把焦點鎖定,不怕拍攝過程中焦點跑掉。

- 整晚拍攝的情況,深夜溫度較低,導星鏡及望遠鏡可能會有露水凝結,除霧帶也是要帶著備用(綠色除霧帶接行動電源 12 V,橘色除霧帶接行動電源 5V 1A)。
- 導星 CCD 有兩條接線,一條接赤道儀的 Guide Port,一條接筆電 USB ,做為 PHD2 的控制線並由筆電提供 CCD 所需的電力。
 |
 |
- 15000 mAh 救車行動電源提供了所有器材的電力需求。

- Lenovo IdeaPad 120S 11吋(4G/64G)做為主控中心,因為只有兩個 USB:
- 兩個 USB 中的任何一個,先連接電子極軸鏡,把極軸精確校準後即可拔除。
- 一個接 Nikon D610:筆電執行 BackyardNikon ,除了控制相機的拍攝外,還可以透過 Starfi 的 ASCOM 直接驅動赤道儀的轉動,在構圖上更加便利,不必在控制手柄上操作(iOptron CEM25-P要連接 Starfi 得透過控制手柄,高級機種CEM60 則不用,真是一分錢一分貨啊!筆電先連上 Starfi ,執行 iOptron Commander 來 GOTO 到 M31,之後再利用 BackyardNikon 微調構圖)。
 |
 |
 |
 |
- 一個接導星 CCD): 筆電執行 PHD2 做為拍攝過程中的 Auto Guiding。
演練時把以上器材全部連接到行動電源(兩條除霧帶、赤道儀開啟追蹤、 Nikon 假電池,也包括筆電),相機連接電子快門線設定曝光十分鐘,行動電源指示燈仍然還是五格的滿格狀態。下圖即為曝光十分鐘的資訊(使用電子快門線,雖設定十分鐘,但快門會被吃掉幾秒,實際只有 591.2 秒)

由於還未實際測試過【飛樂 Discover】 汽柴油兩用 15000 mAh 救車行動電源提供了上述這麼多器材的電力,倒底能撐多久,所以筆電在拍攝前要先充滿電(號稱可撐 8 小時),非必要,行動電源還是先不要接筆電充電。
想請教Luck兄為什麼文中會提到CEM25P沒有backlash的問題?
回覆刪除我的CEM25P之前赤緯經常莫其妙的突然大量標移(大概每幾分鐘會有一次),原本以為是平衡沒做好,但不管怎麼做情況都沒改善,後來用PHD2的導星小幫手(GA)實測,測出來的結果回差(backlash)很大,約3000多ms,這還是在拆機殼將赤緯皮帶調緊後的結果,如果沒調可能會更嚴重,GA建議赤緯只做單向導星(北向),後來我照GA建議設定,情況就改善很多,在無風的情況下,平均RMS(含赤經總合)大概可在0.6-0.8角秒間...我現在也還找不到backlash造成的原因Orz..
這個問題對我來現在有些模糊了,僅就還記得的部份回答,看是否對您有所幫助:
刪除1.印象中 Cem25 會有回差,P 型號則是沒有的。(好像是在說明書看到的--英文的)
2.是否加裝了偏心重錘,沒有的話,的確是會有問題的。
3.有個小技巧,平衡好後(要用水平儀輔助),旋緊離合器後,再放鬆 1/4 圈,或許就能改善。
離合器就是那個銀白色的旋鈕。
刪除感謝Luke兄回覆
回覆刪除我大概查了一下,沒查到說明書有寫CEM25P沒有backlash,倒是在一個賣CEM25P的英文購物網站上有看看到上面有列出說因為CEM25P是用彈性蝸桿消間隙,所以蝸輪跟齒輪間較不會有回差問題,但我想即使如此,若傳動皮帶太鬆或皮帶間隙仍然有可能會有回差問題
因為當初是看了您的文章後才購買CEM25P,所以當時有連偏心重錘一併購買,也一直有在使用,哈~感謝!
另外關於離合旋鈕,我當初在收到貨測試時,就發現赤緯離合旋鈕若完全鎖緊,在順時鐘旋轉到約3,4點鐘方向時,會發出怪聲並卡住不再轉動,除非旋鈕轉回近1圈才沒有這個問題,感覺是機械誤差所造成,所以我現在平衡完後,都會退回近一圈(赤經也差不多)才開始使用
不過也沒關係,今晚天氣不錯,我又上山測試了一次,Backlash依舊嚴重,但如果極軸對的準,赤緯單向導星的結果也還不差,總合RMS也都在1"內,是我可以接受的範圍,所以我也就不急著解決這個問題了,感謝Luke兄!
其實我也蠻建議您有機會的話可以用PHD2的導星小幫手測試看看backlash,如果在2000ms內,可以用回差補償修正,如果超過的話,可先看看皮帶是不是鬆的(我的拆下後才發現皮帶還蠻鬆的),調整皮帶的方法可參考官方提供的這個檔案
http://www.ioptron.us/Support/CEM25_Belt_Tension.pdf
調整前後結果大概會像這個影片
https://www.youtube.com/watch?v=BeymqCVg0BA
供Luke兄參考
謝謝分享。自從使用 APT + PHD2 拍攝後都不太去查看 PHD2 的導星狀況,所以查了一下最近一次留下記錄的是在02.28 發表在 01 的 APT 心得,可能是使用電子極軸鏡的關係吧!Guiding Assistant 兩分鐘後的RMS 為 0.39 arc-sec。加上 PHD2 使用Predictive PEC Guide Algorithm (PPEC)的algorithm,導星拍攝也都沒問題,所以也就沒再深究了。
刪除我剛去看了那篇PO文,0.39 arc-sec應該是Hight frequency star moving(高頻率星點位移)數值,這似乎是指大氣寧視度變動所造成的位移RMS,而非導星的Error RMS,Luke兄可再確認看看!
刪除另外我之前因為找問題到Cloudy Nights討論區查詢時,也看到國外網友建議赤經的演算法改用PPEC,下次我也來試看看,感謝Luke兄建議!
謝謝指正。再看了 01 那篇文(寫在回帖的部分)有兩張導星時的截圖,一張 Total RMS Err 0.48 ,另一張就來到 1.04 ,當時判斷是 Dither 緩衝時間不夠長(APT 預設 15 秒,我好像改為 5 秒還是 10 秒,真忘了。後來改成 30 秒,又覺得太長,再改回 15秒),之後的拍攝好像就沒有再針對 PHD2 截圖。
刪除只有出現問題才會進一步去了解,解決後,順利拍攝一段時間後就會忘掉,若當時沒有記錄下來,以後再出現時又會重頭再來一遍,為了避免同樣情形一再發生,所以才有這個 Blog,因為我也需要參考。
哈哈,Luke兄這個習慣真的很好,除了可以自己當備忘錄,還可以造福像我這種想入門的新手,從您這裡真的學到很多,再次感謝!
刪除您太客氣了。天文攝影這門課我也是永遠的新手。
刪除